
Задачи по теории машин и механизмов: НТБ МАЛИ :: Ошибка 404
РГР ТММ, выполненное решение задач по теории машин и механизмов на Автор24
Решение задач Контрольная работа Курсовая работа Другое Отчёт по практике Реферат Помощь on-line Ответы на вопросы Эссе Презентации Лабораторная работа Статья Дипломная работа Выпускная квалификационная работа Чертёж Повышение уникальности текста Доклад Магистерская диссертация Задача по программированию Творческая работа Набор текста Перевод Копирайтинг Рецензия Сочинения Вычитка и рецензирование работ Маркетинговое исследование Бизнес-план Кандидатская диссертация Подбор темы работы Монография
Авиационная и ракетно-космическая техника Автоматизация технологических процессов Автоматика и управление Актерское мастерство Анализ хозяйственной деятельности Английский язык Антикризисное управление Археология Архитектура и строительство Астрономия Базы данных Банковское дело Безопасность жизнедеятельности Библиотечно-информационная деятельность Бизнес-планирование Биология Биотехнология Бухгалтерский учет и аудит Ветеринария Внешнеэкономическая деятельность Военное дело Воспроизводство и переработка лесных ресурсов Высшая математика География Геодезия Геология Геометрия Гидравлика Гидрометеорология Гостиничное дело Государственное и муниципальное управление Деловой этикет Деньги Детали машин Дизайн Документоведение и архивоведение Естествознание Железнодорожный транспорт Журналистика Издательское дело Инвестиции Инженерные сети и оборудование Инновационный менеджмент Информатика Информационная безопасность Информационные технологии Искусство История Картография и геоинформатика Китайский язык Конфликтология Краеведение Кредит Криминалистика Кулинария Культурология Литература Логика Логистика Маркетинг Материаловедение Машиностроение Медицина Международные отношения Международные рынки Менеджмент Менеджмент организации Металлургия Метрология Механика Микро-, макроэкономика Микропроцессорная техника Морская техника Музыка Налоги Наноинженерия Начертательная геометрия Нефтегазовое дело Организационное развитие Парикмахерское искусство Педагогика Полиграфия Политология Почвоведение Право и юриспруденция Приборостроение и оптотехника Природообустройство и водопользование Программирование Производственный маркетинг и менеджмент Рынок ценных бумаг Промышленный маркетинг и менеджмент Процессы и аппараты Психология Работа на компьютере Радиофизика Режиссура Реклама и PR Религия Русский язык Связи с общественностью Сельское и рыбное хозяйство Сервис Сопротивление материалов Социальная работа Социология Стандартизация Статистика Страноведение Стратегический менеджмент Страхование Таможенное дело Театроведение Текстильная промышленность Телевидение Теоретическая механика Теория вероятностей Теория машин и механизмов Теория управления Теплоэнергетика и теплотехника Технологические машины и оборудование Технология продовольственных продуктов и товаров Товароведение Торговое дело Транспортные средства Туризм Управление качеством Управление персоналом Управление проектами Фармация Физика Физическая культура Философия Финансовый менеджмент Финансы Химия Хирургия Холодильная техника Ценообразование и оценка бизнеса Чертежи Черчение Экология Эконометрика Экономика Экономика предприятия Экономика труда Экономическая теория Экономический анализ Электроника, электротехника, радиотехника Энергетическое машиностроение Этика Ядерная энергетика и теплофизика Ядерные физика и технологии Языки (переводы) Языкознание и филология Другое
Теория механизмов и машин – это.
 .. Что такое Теория механизмов и машин?
.. Что такое Теория механизмов и машин?Теория машин и механизмов (ТММ) — это научная дисциплина об общих методах исследования, построения, кинематики и динамики механизмов и машин и о научных основах их проектирования.
История развития дисциплины
В качестве самостоятельной научной дисциплины ТММ, как и многие другие прикладные разделы механики, возникла на волне промышленной революции, начало которой относится к 30-м годам XVIII столетия, хотя машины создавались задолго до этого, и простые механизмы (колесо, винтовая передача и др.) широко использовались ещё во времена Древнего Египта.
Глубокий научный подход в теории механизмов и машин начал широко применяться с начала XIX века. Весь предшествующий период развития техники можно рассматривать как период эмпирического создания машин, на протяжении которого делались изобретения большого количества простых машин и механизмов, среди которых:
Теория механизмов и машин в своём развитии опиралась на важнейшие физические законы — закон сохранения энергии, законы Амонтона и Кулона для определения сил трения, золотое правило механики и др. В ТММ широко используются законы, теоремы и методы теоретической механики. Важное значение для данной дисциплины имеют: понятие передаточного отношения, основы теории эвольвентного зацепления и др.
В ТММ широко используются законы, теоремы и методы теоретической механики. Важное значение для данной дисциплины имеют: понятие передаточного отношения, основы теории эвольвентного зацепления и др.
Можно отметить роль, которую сыграли в создании предпосылок для развития ТММ, следующие учёные: Л. Эйлер, Леонардо да Винчи, Дж. Кардано, Д. Ватт, Г. Амонтон, Ш. Кулон.
Одним из основоположников теории механизмов и машин считается Пафнутий Чебышев (1812-1894), который во второй половине XIX века опубликовал серию важнейших работ, посвящённых анализу и синтезу механизмов. Одно из его изобретений — механизм Чебышева.
В XIX веке развиваются такие разделы как кинематическая геометрия механизмов (Савари, Шаль, Оливье), кинетостатика (Г. Кориолис), классификация механизмов по функции преобразования движения (Г. Монж), решается задача расчёта маховика (Ж. В. Понселе) и др. Были написаны первые научные монографии по механике машин (Р. Виллис, А. Бориньи), читаются первые курсы лекций по ТММ, выходят первые учебники (А. Бетанкур, Д. С. Чижов, Ю. Вейсбах).
Бетанкур, Д. С. Чижов, Ю. Вейсбах).
Во второй половине XIX столетия публикуются работы немецкого учёного Ф. Рёло, в которых вводятся важные понятия кинематической пары, кинематической цепи и кинематической схемы.
Основные понятия
Машина — технический объект, состоящий из взаимосвязанных функциональных частей (узлов, устройств, механизмов и др.), предназначенный для получения или преобразования механической энергии с целью выполнения возложенных на него функций.
Механизм — система взаимосвязанных тел, предназначенных для преобразования движения одного или нескольких тел в требуемое движение других тел. Механизм составляет основу большинства машин.
Твёрдое тело, входящее в состав механизма, называется звеном. Звено может состоять из одной или нескольких неподвижно соединённых деталей.
Соединение звеньев, допускающее их относительное движение, называется кинематической парой. Наиболее распространённые кинематические пары: цилиндрический шарнир; шаровой шарнир; ползун и направляющая; винтовая передача. На рисунках приведены условные трёхмерные обозначения типовых кинематических пар для построения пространственных кинематических схем механизмов согласно ISO 3952 [1].
На рисунках приведены условные трёхмерные обозначения типовых кинематических пар для построения пространственных кинематических схем механизмов согласно ISO 3952 [1].
Цилиндрический шарнир
Ползун и направляющая
Винтовая пара
Сферический шарнир
При построении механизма звенья соединяются в кинематические цепи. Другими словами, механизм – это кинематическая цепь, в состав которой входит неподвижной звено (стойка или корпус (основание)), число степеней свободы которого равняется числу обобщённых координат, характеризующих положения звеньев относительно стойки. Движение звеньев рассматривается по отношению к неподвижному звену – стойке (корпусу, основанию).
Задачи дисциплины
Теория механизмов и машин решает следующие задачи:
- анализ механизмов, то есть описание движения, кинематический и динамический анализ существующих и разрабатываемых механизмов;
- синтез механизмов, то есть проектирование структуры и геометрии механизмов на основе заданных кинематических и динамических характеристик;
- задачи теории машин-автоматов, рассматривающей вопросы построения схем автоматических машин, исходя из условий согласованной работы отдельных механизмов, и достижения оптимальной продуктивности, точности и надёжности машин-автоматов.


Структура дисциплины
- Структура механизмов и машин.
- Геометрия механизмов и их элементов.
- Кинематика механизмов.
- Динамика машин и механизмов.
Современное состояние дисциплины
Литература
Примечания
- ↑ ISO 3952 Kinematic diagrams – Graphical symbols
Ссылки
Инженерный институт Теория механизмов и машин
Новосибирский государственный
аграрный университет
Задания и методические указания
по выполнению контрольных работ
Новосибирск 2011
УДК 621.01
ББК 34.41
Кафедра теоретической и прикладной механики
Составитель канд. техн. наук, доц. Ю.И. Евдокимов
Рецензент
канд. техн. наук, доц. П.И. Федюнин
техн. наук, доц. П.И. Федюнин
Теория механизмов и машин: задания и метод. указания по выполнению контр. работ/ Новосиб. гос. аграр. ун-т. Инженер. ин-т; сост. Ю.И Евдокимов.– Новосибирск, 2011. – 44 с.
Методическая разработка содержит задания для двух контрольных работ по теории механизмов и машин. Задания охватывают основные разделы курса: структурное, кинематическое и силовое исследование плоских рычажных механизмов, а также кинематический анализ многоступенчатых зубчатых передач. Приводятся примеры выполнения каждой задачи контрольных работ.
Предназначена для студентов инженерных специальностей.
Утверждена и рекомендована к изданию методическим советом Инженерного института (протокол № 10 от 11 ноября 2010 г.).
Новосибирский государственный аграрный университет, 2011
Введение
Основной
целью изучения дисциплины «Теория
механизмов и машин» является приобретение
теоретических знаний общих свойств
большого разнообразия механизмов,
входящих в состав машин, применяемых в
сельскохозяйственном и другом
производстве.
Самостоятельное решение задач, поставленных в контрольных работах по теории механизмов и машин, закрепляет теоретические знания и способствует лучшему усвоению дисциплины и использованию теории на практике.
Настоящая методическая разработка соответствует программе по дисциплине «Теория механизмов и машин» для инженерно-технических специальностей высших учебных заведений и содержит задачи для двух контрольных работ.
При определении некоторых параметров исходных данных для решения задач следует учитывать величину коэффициента N, размерность которого совпадает с размерностью определяемого параметра исходных данных. Величина коэффициентаN зависит от года поступления студента в институт и выбирается из таблицы 0.
Таблица 0 Значения коэффициента N
Год поступления | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 |
Значение N | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 10 |
Выбор
номера варианта задач контрольных работ
производится по двум последним цифрам
условного шифра, т. е. номера зачётной
книжки студента.
е. номера зачётной
книжки студента.
1. Содержание и объём контрольной работы 1
Контрольная работа 1 включает в себя задачи 1 и 2.
1.1. Задача 1. Структурный анализ плоского рычажного механизма
Исходные данные
В качестве исходных данных предлагаются структурные схемы плоских рычажных механизмов, изображённые на рисунке 1.1. Выбор номера варианта схемы механизма следует производить по последней цифреномера зачётной книжки студента.
Необходимо выполнить следующее:
Ознакомиться с заданной схемой механизма, выявить стойку, входное, выходное и промежуточные звенья. Изобразить структурную схему механизма без соблюдения масштаба, пронумеровать все звенья (стойку обозначить цифрой 0), обозначить все кинематические пары прописными буквами (О, А, В, С…).
Установить виды движения звеньев относительно стойки (абсолютные) и виды движения относительно друг друга.
Составить
таблицу кинематических пар, в которой
указать номера звеньев, образующих
каждую пару, название каждой пары и
число её степеней свободы.Найти число степеней свободы механизма по формуле П.Л. Чебышева.
Выделить начальное звено 1 и стойку 0, изобразив их отдельно.
Оставшуюся кинематическую цепь разложить на структурные группы (группы Ассура), изобразив их отдельно. Указать класс и вид каждой структурной группы.
 Составить
таблицу кинематических пар, в которой
указать номера звеньев, образующих
каждую пару, название каждой пары и
число её степеней свободы.
Составить
таблицу кинематических пар, в которой
указать номера звеньев, образующих
каждую пару, название каждой пары и
число её степеней свободы.Рисунок 1. 1 – Структурные схемы плоских рычажных механизмов
к задаче 1
Решение задач по ТММ. Заказать решение задач по теории механизмов и машин
Спасибо за скорость и качество!
Понравилось обслуживание в личном кабинете на сайте. Все очень быстро, чётко. Отвечали оперативно на все мои вопросы и быстро подготовили решение. Мне нужно было не срочно получить задачки, до конца сессии просто сдать. Но получилось так, что я принесла все листики уже через пару дней!)
Но получилось так, что я принесла все листики уже через пару дней!)
Спасибо большое!
В работу вносятся правки, и это отлично! Мое счастье, что вовремя сообразила. В первый раз сдавала, препод не принял ответы без проставленных методов решения. Типа, надо объяснять, как я пришла к такому выводу. Написала менеджеру на сайте, вопрос был решен через день, добавили развернутые ответы.
5,0 rating based on 521 ratingsОоочень благодарна Вам!
Уважаемые сотрудника сайта. Я ооочень рада что Вы мне помогаете с учёбой. Постоянно у Вас заказываю решение по сопромату, термодинамике, матанализу и другим непонятным предметам))). Вообщем спасибо огромное, вы мне помогаете получить высшее образование. Еще хотелось бы Вас попросить о скидках ))
5,0 rating based on 521 ratingsЗаочникам тоже помогут! Спасибо
Пришлось сдать вступительные и начать учиться на заочке. Честно – я уже в возрасте и уделять время на учебу нет желания. Решил воспользоваться – написал на решаем онлайн, сотрудники быстро ответили, проконсультировали. Теперь заказываю решение задач только у них
Решил воспользоваться – написал на решаем онлайн, сотрудники быстро ответили, проконсультировали. Теперь заказываю решение задач только у них
На удивление недорого и качественно!
Только поступил на 1-ый курс. Наткнулся на проблему – никто не хотел мне помогать с учёбой и домашнем заданием. Решил обратиться к интернету. Очень долго искал подходящий сайт по решение домашних задач. Но везде очень много берут денег и не понятно за что. Самый недорогой сервис – решаем онлайн.
5,0 rating based on 521 ratingsЗаказываю все решения по эконом теории только в решаем онлайн
Что в школе, что в университете училась на пять. Но тут наткнулась на предмет, с который у меня ну ни как не выходит разобраться, а тем более понять. Тут у наших ребят подслушала, что решения по различным предметам заказывают, где то в сети. Обратилась и заказываю все решения по эконом теории у вас!
5,0 rating based on 521 ratingsУбедился в качественном сервисе 5+
Заказывал решение задач на разных сайтах. Постоянно были проблемы с выполнением. То преподаватели были не довольны, при этом мне не переделывали решение. То не вовремя скинут задачу и опять же не были довольны мной преподы. Наткнулся на сайт решаемонлайн – стал систематично заказывать только тут.
Постоянно были проблемы с выполнением. То преподаватели были не довольны, при этом мне не переделывали решение. То не вовремя скинут задачу и опять же не были довольны мной преподы. Наткнулся на сайт решаемонлайн – стал систематично заказывать только тут.
Скорость и удобство порадовали
Меня смутило, что некуда приложить условия, на сайте только email и имя. Однако после открылся личный кабинет, где я нашла все нужые вкладки. Отправила фотографию с заданием и села ждать. Ответили моментально, прислали цену и сказали, что нашли автора. Я в восторге от скорости.
5,0 rating based on 521 ratingsМорока с Гражданским правом решена на отлично!
Работаю, воспитываю двоих детей одна. Параллельно учусь на заочке. Времени катастрофически не хватает ни на что. На учебе была на гране вылета из-за предмета гражданское право, накопилось много хвостов. Подружка посоветовала обратиться к ребятам из решаемонлайн. В общем они еще и диплом написали!
5,0 rating based on 521 ratingsСессия для Бухгалтера теперь без проблем ребята!)
Катастрофически не хватает времени! Учусь на бухгалтера и каждую сессию получаю эти пресловутые задачки. Спасибо вам за помощь с работами! Я всегда оформлялась за несколько дней до сдачи, чтобы успеть получить, проверить, распечатать и сдать. Радуют цены, т.к. за учебу итак плачу денежку немалую.
Спасибо вам за помощь с работами! Я всегда оформлялась за несколько дней до сдачи, чтобы успеть получить, проверить, распечатать и сдать. Радуют цены, т.к. за учебу итак плачу денежку немалую.
Кто не любит писать сочинения тогда вам сюда!
Очень люблю точные науки. С цифрами мне проще работать. Поэтому я поступил на физмат. Но оказывается весь первый курс у нас продолжают преподавать школьную программу по русскому языку и литературе. Ненавижу писать сочинения. Спасибо однокурснику – показал сайт на котором быстро, качественно!
5,0 rating based on 521 ratingsНезаменимые помощники!
После 9 класса поступил в колледж. Случайно узнал о сайте решаемонлайн – делают за тебя всю домашнюю работу быстро и не дорого. Одногруппники о таком сайте не знают. Стал всем ребятам предлагать помощь в домашнем задании, при этом перенаправляю на работников сайта!
5,0 rating based on 521 ratingsЗакрыл сессию на отлично благодаря Вам!
Спасибо вам, дорогие друзья, за помощь! Для меня было жизненно важно закрыть сессию и сдать все экзамены, чтобы получить стипендию.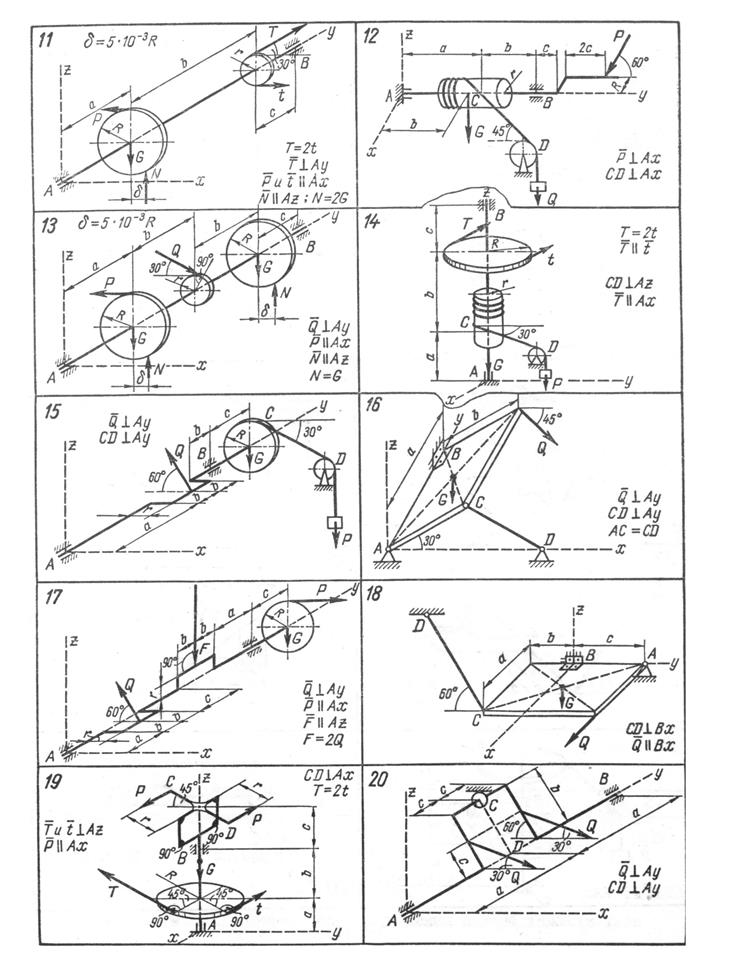 Но я вообще, ну никак не успевала сдать парочку задач по макроэкономике, списывать было не вариант. Мне решили все за один день, по демократичной цене!
Но я вообще, ну никак не успевала сдать парочку задач по макроэкономике, списывать было не вариант. Мне решили все за один день, по демократичной цене!
Мастера на все руки!
Всю свою сознательную жизнь программировал на С++, а тут преподаватель задал задачку на языке Phynton. Не стал долго заморачиваться и написал ребятам из решаемонлайн – был очень удивлен когда они взялись за работу и через день прислали решение задачи. При этом денег практически не взяли!
5,0 rating based on 521 ratingsОперативный сервис!
На последних курсах просто некогда заниматься заданиями, которые выдаются на дом. Итак куча дел, а я должен видеть ночами и помимо основной работы и диплома писать задачки. Нашел сайт, где буду заказывать ответы для галочки, а получил настоящих друзей со скидками и супербыстрой реакцией! Спасибо!
5,0 rating based on 521 ratingsСпасибо! Очень выручили
Компьютер для меня – это настоящая черная дыра, умею только то, что делает среднестатистический пользователь. Задали сделать видео с музыкой из своих фоток, а я только накачала вирусов, пока искала программку. Посоветовали обратиться к специалистам, нашла ваш сайт. Спасибо за готовое задание!
Задали сделать видео с музыкой из своих фоток, а я только накачала вирусов, пока искала программку. Посоветовали обратиться к специалистам, нашла ваш сайт. Спасибо за готовое задание!
Ваш выпускник!)
На втором курсе учиться очень сложно. Я не успевал ничего из-за новых предметов и жуткого расписания занятий. Именно тогда с вами познакомился и стал заказывать мелкие задачки, которые делать не хотелось (или попросту не хватало часов в сутках). Сейчас выпускаюсь и хочу сказать спасибо за поддержку
5,0 rating based on 521 ratingsОбратился впервые – компания не подвела!
На потоке знакомый подкинул идею – что бы самому не заморачиваться с выполнением задач по термодинамики, можно заказать где-то в интернете. Наткнулся на reshaemonline. Предоставил всю методичку, решения скидывают по мере необходимости, еще ни разу не подводили.
5,0 rating based on 521 ratingsТеперь матанализ не зло!
Мне нужно было срочно решить несколько задач по матанализу, иначе ждало отчисление. От безысходности полез в интернет и начал оставлять заявки везде, где предлагаются услуги помощи студентам. Тут мне ответили быстрее всех, я оформил заказ и получил файлик с готовым решением в этот же день. Спасибо!
От безысходности полез в интернет и начал оставлять заявки везде, где предлагаются услуги помощи студентам. Тут мне ответили быстрее всех, я оформил заказ и получил файлик с готовым решением в этот же день. Спасибо!
Большое спасибо!
Медикам особенно тяжело учиться… я частенько обращаюсь за помощью, чтобы закрыть неважные предметы и уделить время учебе по специальности. Задачи по генетике – это зло, но мне не пришлось ими заниматься. 🙂 Я просто передал специалистам нежелаемые дела и получил море свободного времени для написания
5,0 rating based on 521 ratingsБлагодарю за помощь!
Медикам особенно тяжело учиться… я частенько обращаюсь за помощью, чтобы закрыть неважные предметы и уделить время учебе по специальности. Задачи по генетике – это зло, но мне не пришлось ими заниматься. 🙂 Я просто передал специалистам нежелаемые дела и получил море свободного времени для написания
5,0 rating based on 521 ratingsТеория машин и механизмов | J.
 Mech. Des.
Mech. Des.Теория механизмов Джона Дж. Уикера, Гордона Р. Пеннок и Джозефа Э. Шигли, 3-е издание. Оксфорд Пресс, 2003
Стипендия покойного Джозефа Шигли продолжает влиять на образование в области механического проектирования почти через десять лет после его смерти в 1994 году путем публикации новых изданий его книг Теория машин и механизмов (Oxford Press) с проф.Уикер и Пеннок, а также его Engineering Design (McGraw-Hill) с профессором Мишке. Теория машин и механизмов восходит к интеграции работ профессора Шигли «Кинематический анализ механизмов » и «Динамический анализ машин » в единую книгу «Теория машин » в 1961 году. Джон Юикер работал с профессором Шигли над второе издание 1995 г., которое включало анализ пространственных механизмов и роботов с использованием векторных формулировок, адаптированных для численных вычислений. В этом третьем издании Гордон Пеннок вместе с профессором Уикером представил новый впечатляющий вид этому классическому тексту. Книга разделена на три основные части: кинематика и механизмы, конструкция механизмов и динамика машин. В первой части основное внимание уделяется анализу механического движения, и мне нравится формулировка вектора и матрицы, которая включает кинематические коэффициенты, потому что она обеспечивает удобный переход к анализу пространственных механизмов и роботов. Также тщательно представлены графические и сложные векторные подходы, которые хорошо адаптированы для изучения плоских механизмов.Вторая часть представляет собой обзор кулачков, зубчатых передач и рычагов, а также кинематики робота. В третьей части представлен анализ сил, вибрации и балансировки ряда систем машин, включая двигатели, маховики, регуляторы и гироскопы. В этой книге меня больше всего беспокоит то, что в прошлом теория машин обязательно фокусировалась на скорости, ускорении и силах в устройстве в одной конкретной конфигурации, в то время как значение этих параметров во всем движении представляет интерес.
В этом третьем издании Гордон Пеннок вместе с профессором Уикером представил новый впечатляющий вид этому классическому тексту. Книга разделена на три основные части: кинематика и механизмы, конструкция механизмов и динамика машин. В первой части основное внимание уделяется анализу механического движения, и мне нравится формулировка вектора и матрицы, которая включает кинематические коэффициенты, потому что она обеспечивает удобный переход к анализу пространственных механизмов и роботов. Также тщательно представлены графические и сложные векторные подходы, которые хорошо адаптированы для изучения плоских механизмов.Вторая часть представляет собой обзор кулачков, зубчатых передач и рычагов, а также кинематики робота. В третьей части представлен анализ сил, вибрации и балансировки ряда систем машин, включая двигатели, маховики, регуляторы и гироскопы. В этой книге меня больше всего беспокоит то, что в прошлом теория машин обязательно фокусировалась на скорости, ускорении и силах в устройстве в одной конкретной конфигурации, в то время как значение этих параметров во всем движении представляет интерес. Проф.Программа Uicker Integrated Mechanisms (IMP), созданная еще в 1964 году, была одной из первых программных систем для моделирования машин, а профессор Пеннок является ведущим исследователем в области анализа роботов и пространственных связей. Я надеюсь, что их будущие выпуски будут продвигаться в направлении демонстрации студентам, как анализировать и моделировать движение машинных систем с помощью компьютеров, доступных большинству инженеров. В любом случае, эта книга представляет собой прекрасное изложение теории машин с глубиной и широтой, которая может найти применение в курсах, начиная от студенческого обзора теории машин до продвинутого студенческого или даже магистерского курса по кинематике и динамике машин.Практикующие инженеры сочтут эту книгу ценным справочником по принципам теории машин.
Проф.Программа Uicker Integrated Mechanisms (IMP), созданная еще в 1964 году, была одной из первых программных систем для моделирования машин, а профессор Пеннок является ведущим исследователем в области анализа роботов и пространственных связей. Я надеюсь, что их будущие выпуски будут продвигаться в направлении демонстрации студентам, как анализировать и моделировать движение машинных систем с помощью компьютеров, доступных большинству инженеров. В любом случае, эта книга представляет собой прекрасное изложение теории машин с глубиной и широтой, которая может найти применение в курсах, начиная от студенческого обзора теории машин до продвинутого студенческого или даже магистерского курса по кинематике и динамике машин.Практикующие инженеры сочтут эту книгу ценным справочником по принципам теории машин.
Калифорнийский университет, Ирвин
(PDF) Введение в теорию машин
Колледж инженерии и технологий Браун-Хиллз Кинематика машин
Подготовил: Сачин Чатурведи Асст. Профессор, машиностроение 1
Профессор, машиностроение 1
Введение: механизмы и машины, кинематические звенья, кинематические пары, кинематические цепи, плоскость
и космический механизм, кинематическая инверсия, эквивалентные связи, четырехзвенные плоские механизмы, подвижность
и диапазон движения, прямая линия механизмы, рулевые механизмы, пантограф,
проблемы.
Введение: Теория машин может быть определена как отрасль инженерной науки
, которая занимается изучением относительного движения между различными частями
машины и сил, действующих на них. Знание этого предмета очень важно для
инженера при проектировании различных частей машины.
Классификация теории машин по следующим четырем направлениям:
1. Кинематика: занимается относительным движением между различными частями машин.
2. Динамика: имеет дело с силами и их эффектами при воздействии на детали машины в движении
.
3. Кинетика: имеет дело с силами инерции, которые возникают в результате комбинированного воздействия массы
и движения частей машины.
4. Статика: работает с силами и их воздействием, когда части машины находятся в покое. Считается, что массой
частей можно пренебречь.
Механизмы – это комбинация жестких или ограничивающих частей или корпусов, из которых
собирается машина, это делается путем фиксации одной из частей, а относительное движение других частей
определяется по отношению к фиксированная часть.Пример: кривошипно-шатунный механизм, используемый в двигателе внутреннего сгорания
или поршневом воздушном компрессоре, где вращательное движение кривошипа
преобразуется через шатун в возвратно-поступательное движение ползуна, или
наоборот. Фиг показывает; Link-1 – фиксированный, Link-2 – это кривошип, Link-3 – это шатун, а Link-4 – это поршень
, который скользит в цилиндре. Однако термин «связь» широко используется как синоним
слова «механизм».
Машина представляет собой комбинацию механизмов, которая получает энергию и преобразует ее в
некоторую полезную работу, от которой мы сокращаем человеческие усилия. Машина состоит из
Машина состоит из
частей или корпусов.
Кинематическая связь
Каждая часть машины, которая движется относительно какой-либо другой части, называется кинематической связью.
Звено может состоять из нескольких частей, которые жестко скреплены между собой, так что
они не перемещаются относительно другой части.Например, в поршневом паровом двигателе поршень, шток поршня
и крейцкопф составляют одно звено; шатун с большим и малым концевыми подшипниками
составляет второе звено; кривошип, коленчатый вал и маховик – третье звено, а цилиндр, двигатель
, рамаи коренные подшипники – четвертое звено.
Типы звеньев
1. Жесткое звено: жесткое звено не подвергается деформации при передаче движения
.
Теория машин и механизмов, 4-е издание: Джон Джозеф Уикер, Гордон Пеннок, Джозельф Шигли: Твердый переплет: 9780195371239: Книги Пауэлла
Теория машин и механизмов обеспечивает основу для изучения смещений, скоростей, ускорений, а также статических и динамических сил требуется для правильной конструкции механических рычагов, кулачков и зубчатых систем. Авторы представляют основу, обозначения и номенклатуру, необходимые студентам для понимания различных и независимых технических подходов, существующих в области механизмов, кинематики и динамики. Этот текст, полностью переработанный в своем четвертом издании, идеально подходит для студентов старших курсов или аспирантов в области машиностроения, которые изучают кинематику и / или динамику машин.
Авторы представляют основу, обозначения и номенклатуру, необходимые студентам для понимания различных и независимых технических подходов, существующих в области механизмов, кинематики и динамики. Этот текст, полностью переработанный в своем четвертом издании, идеально подходит для студентов старших курсов или аспирантов в области машиностроения, которые изучают кинематику и / или динамику машин.Характеристики
Предлагает сбалансированное покрытие всех тем как графическими, так и аналитическими методами
Охватывает все основные аналитические подходы
Включает введение в кинематические коэффициенты, которые четко отделяют кинематические (геометрические) эффекты от рабочей скорости и других динамических зависимостей – и унифицирует охват связей с этими коэффициентами для кулачков и зубчатых систем
Предоставляет графические решения для упражнений, которые теперь выполняются профессиональным программным обеспечением САПР с точностью выше одного процента
Новое в этой редакции
Включает больше проработанных примеров на всем протяжении и новые и обновленные домашние задания в конце главы
Предлагает новый материал по синтезу и теории кривизны и обобщает некоторые темы (главы 7, 8 и 9 теперь представляют собой одну главу, а главы 21, 22 и 23 теперь являются одна глава)
Две новые главы: Глава 5 посвящена планарным связям с несколькими степенями свободы и в главе 14 обсуждается динамический анализ сил.
Приложения
Текстовый компакт-диск включает анимацию рабочих моделей ключевых понятий из книги, чтобы помочь студентам визуализировать и понять материал.
Компакт-диск инструктора включает слайды с рисунками из текста и решения в формате PowerPoint. работал в MatLabRG над некоторыми домашними заданиями из книги
Сопутствующий веб-сайт (http: // www.oup.com/us/uickerd) предоставляет дополнительную информацию и ресурсы.
Теория машин и механизмов обеспечивает основу для изучения перемещений, скоростей, ускорений, а также статических и динамических сил, необходимых для правильной конструкции механических рычагов, кулачков и редукторов. системы. Авторы представляют основу, обозначения и номенклатуру, необходимые студентам для понимания различных и независимых технических подходов, существующих в области механизмов, кинематики и динамики.Охват всех методов анализа и разработки сбалансирован, с использованием как аналитических, так и графических инструментов. Этот текст идеально подходит для студентов старших курсов или аспирантов, изучающих машиностроение, изучающих курс кинематики и / или динамики машин. Характеристики
Этот текст идеально подходит для студентов старших курсов или аспирантов, изучающих машиностроение, изучающих курс кинематики и / или динамики машин. Характеристики
Включает введение в кинематические коэффициенты, которое четко отделяет кинематические (геометрические) эффекты от рабочей скорости и других динамических зависимостей и объединяет охват рычажных механизмов с охватом кулачков и зубчатых передач
Содержит совершенно новые главы о анализ и проектирование маховиков, регуляторов и гироскопов
Предоставляет графические и аналитические решения для упражнений, теперь проверенные профессиональным программным обеспечением САПР с точностью выше одного процента
Предлагает новые качественные иллюстрации, теперь в двух цветах
Руководство по решениям и PowerPoint «Накладные расходы, доступные только для пользователей
 Теория машин и механизмов известна простотой и ясностью стиля письма и экономичным освещением большого количества тем.
Теория машин и механизмов известна простотой и ясностью стиля письма и экономичным освещением большого количества тем.Пересмотренное 4-е издание включает больше проработанных примеров по всему тексту, а также новые и обновленные домашние задания в конце главы. Некоторые темы были сокращены (главы 7, 8 и 9 теперь представляют собой одну главу; главы 21, 22 и 23 теперь представляют собой одну главу), и добавлен материал по синтезу и теории кривизны. Есть новая глава 5 о плоских связях с несколькими степенями свободы, а глава 14 – совершенно новая.
Текстовый компакт-диск включает анимированные рабочие модели ключевых понятий из книги, чтобы помочь студентам визуализировать и осмыслить материал. Компакт-диск для инструктора включает в себя слайды с рисунками из текста в формате PowerPoint и решения, разработанные в MatLab для выбранных домашних заданий из книги, предназначенные для предоставления инструкторам учебных ресурсов, если они захотят интегрировать MatLab в свой курс.
Теория машин и механизмов предоставляет текст для полного исследования перемещений, скоростей, ускорений, а также статических и динамических сил, необходимых для правильного проектирования механических рычагов, кулачков и зубчатых систем.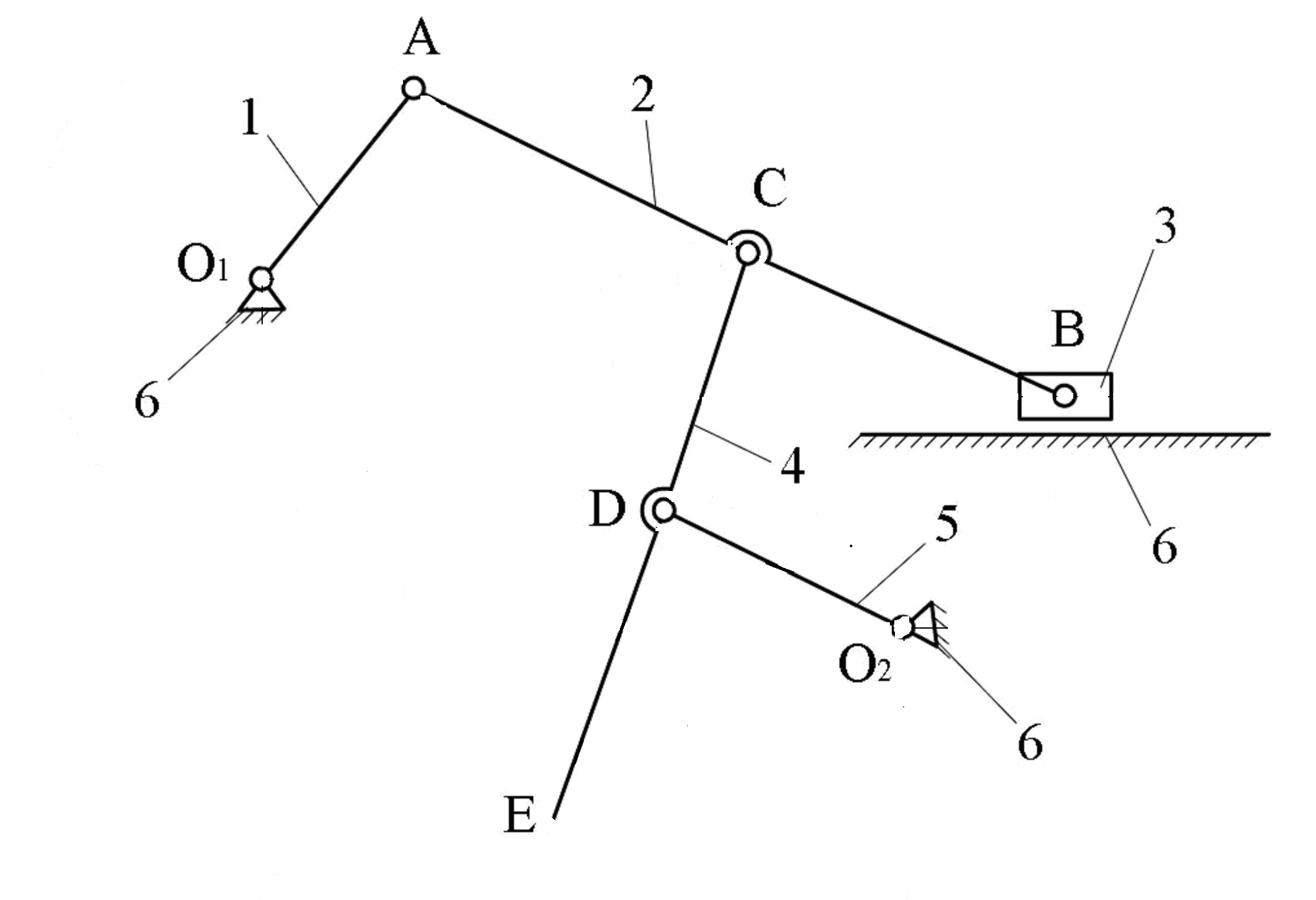 Авторы представляют основу, обозначения и номенклатуру, необходимые студентам для понимания различных независимых технических подходов, существующих в области механизмов, кинематики и динамики.
Авторы представляют основу, обозначения и номенклатуру, необходимые студентам для понимания различных независимых технических подходов, существующих в области механизмов, кинематики и динамики.В настоящее время полностью переработано в своем четвертом издании, этот текст идеально подходит для студентов старших курсов или аспирантов в области машиностроения, которые изучают кинематику и / или динамику машин.
Новое в четвертом издании
* Включает больше проработанных примеров и множество новых и обновленных домашних заданий в конце главы
* Охват косозубых, конических, червячных и червячных передач теперь интегрирован в одна глава
* Материал по плоскому и пространственному динамическому анализу сил теперь объединен в единую главу
* Добавлена совершенно новая глава, посвященная анализу плоских рычагов с несколькими степенями свободы
* Глава по кинематическому синтезу был значительно расширен и теперь включает в себя три и четыре графических метода точного позиционирования.
* Глава, посвященная статическому анализу сил, была расширена и теперь включает описание потери устойчивости двухсиловых элементов с осевой нагрузкой при сжатии
Дополнения
* Текстовый компакт-диск включает анимацию рабочих моделей многих фигур из текста, чтобы помочь студентам визуализировать и понять их движение
* Дополнительный веб-сайт для инструкторов (www.oup.com/us/uicker) предоставляет дополнительную информацию и ресурсы, включая слайды с рисунками из текста в формате PowerPoint.
Джон Дж. Юикер-младший – профессор машиностроения в Университете Висконсина в Мэдисоне. Его педагогические и исследовательские специальности – твердотельное геометрическое моделирование, моделирование механических движений и их применение в автоматизированном проектировании и производстве. Он получил докторскую степень. получил степень бакалавра машиностроения в Северо-Западном университете и поступил на факультет Висконсинского университета в 1967 году.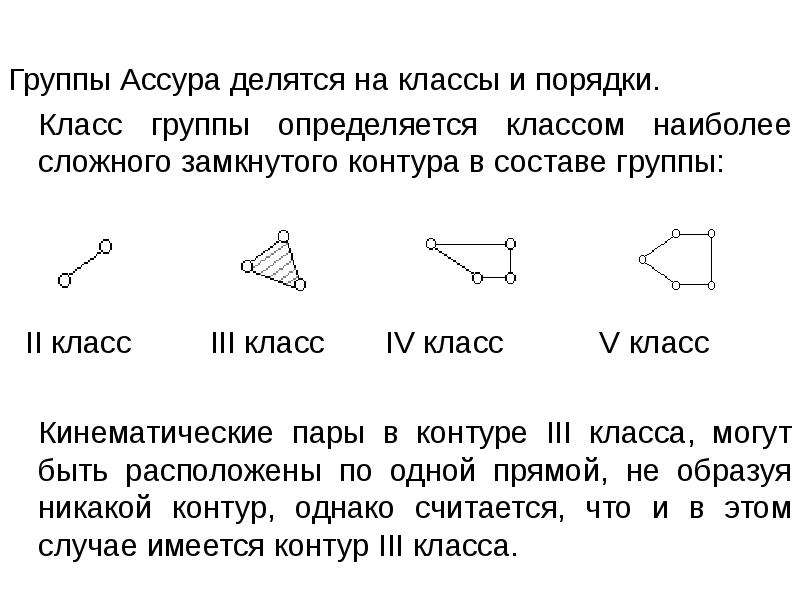 Уикер – один из основателей Совета США по теории машин и механизмов. Несколько лет он работал главным редактором журнала «Теория механизмов и машин».
Уикер – один из основателей Совета США по теории машин и механизмов. Несколько лет он работал главным редактором журнала «Теория механизмов и машин».Гордон Р. Пеннок – доцент кафедры машиностроения в Университете Пердью, Западный Лафайет, Индиана. Его педагогический опыт в основном связан с проектированием машин. Его исследовательские специальности – теоретическая кинематика и динамика механического движения. Он применил свои исследования к робототехнике, вращающемуся оборудованию и биомеханике, включая кинематику и динамику шарнирно-сочлененных механических систем с твердым телом.
Получил докторскую степень. степень в области машиностроения Калифорнийского университета в Дэвисе. С момента прихода на факультет Университета Пердью в 1983 году он работал в нескольких национальных комитетах и международных программных комитетах. Он является советником студенческой секции Американского общества инженеров-механиков (ASME) в Университете Пердью, председателем по связям с колледжами региона VI, старшим представителем комитета студенческой секции и членом Совета по делам студентов. Он также является сотрудником отдела двигателей внутреннего сгорания, ASME, и с 1993 по 1997 год занимал должность председателя технического комитета по механическому проектированию Отделения двигателей внутреннего сгорания.Он является членом Американского общества инженеров-механиков.
Он также является сотрудником отдела двигателей внутреннего сгорания, ASME, и с 1993 по 1997 год занимал должность председателя технического комитета по механическому проектированию Отделения двигателей внутреннего сгорания.Он является членом Американского общества инженеров-механиков.
Джозеф Э. Шигли (умер в мае 1994 г.) был почетным профессором машиностроения в Мичиганском университете и членом Американского общества инженеров-механиков. Он получил награду Комитета по механизмам, медаль Вустера Рида Уорнера и премию за дизайн машин. Он был автором восьми книг, в том числе «Проектирование машиностроения» (совместно с Чарльзом Р. Мишке) и «Прикладная механика материалов». Он также был главным соредактором Стандартного справочника по проектированию машин.Он впервые написал «Кинематический анализ механизмов» в 1958 году и «Динамический анализ машин» в 1961 году. Эти тексты были опубликованы в едином томе под названием «Теория машин» в 1961 году и с течением времени эволюционировали в нынешний текст «Теория машин и механизмов», который теперь в редакции. Третье издание.
Третье издание.
Предисловие
Об авторах
Часть 1 Кинематика и механизмы
1 Мир механизмов
1.1 Введение
1.2 Анализ и синтез
1.3 Наука о механике
1.4 Терминология, определения и предположения
1.5 Плоские, сферические и пространственные механизмы
1.6 Мобильность
1.7 Классификация механизмов
1.8 Кинематическая инверсия
1.9 Закон Грасгофа
1.10000 Механическое преимущество
1.10000
Задачи
2 Положение и смещение
2.1 Географическое положение движущейся точки
2.2 Положение точки
2.3 Разница положений между двумя точками
2.4 Кажущееся положение точки
2.5 Абсолютное положение точки
2.6 Уравнение замыкания цикла
2.7 Графический анализ положения
2.8 Алгебраический анализ положения
2.9 Комплексно-алгебраические решения плоских векторных уравнений
2. 10 Комплексные полярные Алгебра
10 Комплексные полярные Алгебра
2.11 Решения Чейза для плоских векторных уравнений
2.12 Методы анализа положения
2.13 Генерация соединительной кривой
2.14 Смещение движущейся точки
2.15 Разница смещения между двумя точками
2.16 Вращение и перемещение
2.17 Кажущееся смещение
2.18 Абсолютное смещение
2.19 Кажущееся угловое смещение
Проблемы
3 Скорость
3.1 Определение скорости вращения тела
3.3 Разница скоростей между точками твердого тела
3.4 Графические методы; Полигоны скорости
3.5 Кажущаяся скорость точки в подвижной системе координат
3.6 Кажущаяся угловая скорость
3.7 Прямой контакт и контакт качения
3.8 Систематическая стратегия для анализа скорости
3.9 Аналитические методы
3.10 Методы комплексной алгебры
3.11 Векторный метод
3.12 Метод кинематических коэффициентов
мгновенных
Центр скорости 3.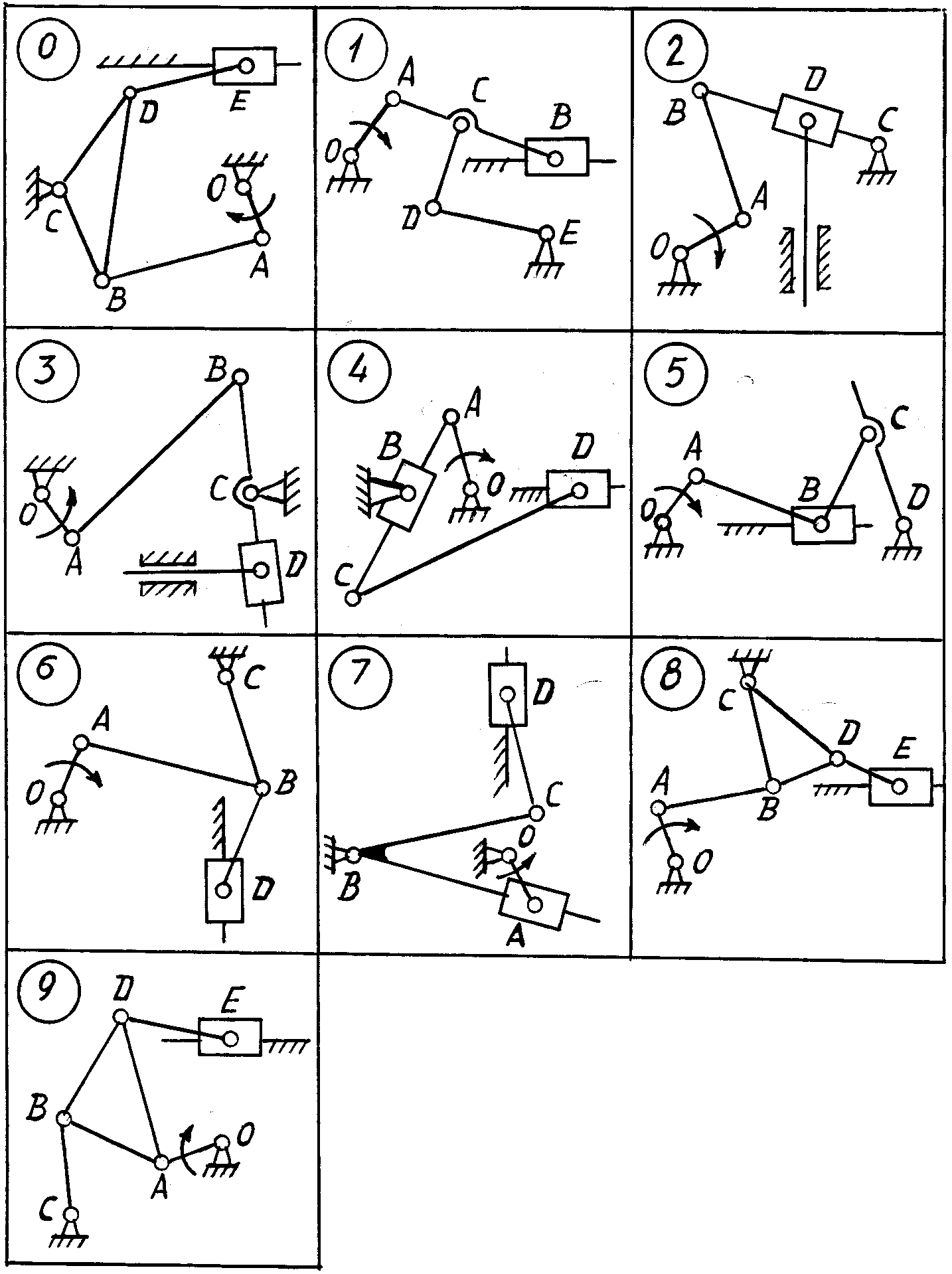 14 Теорема Аронхолда-Кеннеди о трех центрах
14 Теорема Аронхолда-Кеннеди о трех центрах
3.15 Обнаружение мгновенных центров скорости
3.16 Анализ скорости с использованием мгновенных центров
3.17 Теорема об угловом соотношении скоростей
3.18 Взаимосвязь между кинематическими коэффициентами первого порядка и мгновенными центрами
3.19 Теорема Фрейденштейна
3.20 Показатели достоинства; Mechanical Advantage
3.21 Centrodes
Проблемы
4 Ускорение
4.1 Определение ускорения
4.2 Угловое ускорение
4.3 Разница в ускорении между точками твердого тела
4.4 многоугольника ускорения
4.5 Видимое ускорение точки в подвижной системе координат
4.6 Видимое угловое ускорение
4.7 Прямой контакт и подвижный контакт
4.8 Систематическая стратегия для анализа ускорения
4.9 Аналитические методы
4.10 Комплексные алгебраические методы
4.11 Решения Чейса
4.12 Метод кинематических коэффициентов
4. 13 Уравнение Эйлера-Савари
13 Уравнение Эйлера-Савари
4.14 Конструкции Бобилье
4.15 Мгновенный центр ускорения
4.16 Круг Бресса (или круг де Ла Хира)
4.17 Радиус кривизны точечной траектории с использованием кинематических коэффициентов
4.18 Кубик стационарной кривизны
Задачи 5 Планарные связи с несколькими степенями свободы
5.1 Введение
5.2 Анализ положения; Алгебраическое решение
5.3 Графические методы; Полигоны скорости
5.4 мгновенных центра скорости
5.5 Кинематические коэффициенты первого порядка
5.6 Метод наложения
5.7 Графический метод; Полигоны ускорения
5.8 Кинематические коэффициенты второго порядка
5.9 Кривизна траектории точки соединения
5.10 Метод конечных разностей
Задачи
Часть 2 Конструкция механизмов
6 Введение в конструкцию кулачков 9000 6,2000
6 Классификация кулачков и повторителей
6. 3 Диаграммы перемещений
3 Диаграммы перемещений
6.4 Графическое изображение профилей кулачков
6.5 Кинематические коэффициенты движения толкателя
6.6 Высокоскоростные кулачки
6.7 Стандартные движения кулачков
6.8 Согласование производных диаграмм перемещений
6.9 Кулачок с перекладыванием пластин Торцевой толкатель
6.10 Кулачок с роликовым толкателем
Проблемы
7 Цилиндрические зубчатые колеса
7.1 Терминология и определения
7.2 Основной закон зубчатой передачи
7.3 Эвольвентные свойства
7.4 Сменные шестерни; Стандарты AGMA
7.5 Основы работы зубчатых колес
7.6 Изготовление зубьев шестерни
7.7 Помехи и подрезание
7,8 Коэффициент контакта
7,9 Изменение межцентрового расстояния
7,10 Инволютометрия
7,11 Проблемы с зубьями
7,11
8 Цилиндрические, конические, червячные и червячные передачи
8.1 Параллельно-осевые косозубые шестерни
8. 2 Соотношение зубьев косозубой шестерни
2 Соотношение зубьев косозубой шестерни
8.3 Пропорции зубьев косозубой шестерни
8.4 Контакт зубьев косозубой шестерни
8.5 Замена цилиндрических зубчатых колес на косозубые
8.6 Шестерни с елочкой
8,7 косозубые шестерни
8.8 Прямозубые конические шестерни
8.9 Пропорции зубьев конических шестерен
8.10 Венечные и торцевые шестерни
8.11 Спиральные конические шестерни
8.12 гипоидных передач
8.13 Червячные и червячные передачи
Проблемы
9 зубчатых передач
9.1 Параллельно-осевые зубчатые передачи
9.2 Примеры зубчатых передач
9.3 Определение номеров зубьев
9.4 Epicyclic Эпициклические зубчатые передачи
9.6 Анализ планетарных зубчатых передач по формуле
9.7 Табличный анализ планетарных зубчатых передач
9.8 Лето и дифференциалы
9.9 Полноприводная передача
Проблемы
10 Синтез рычагов
10.1 Синтез типов, чисел и размеров
10. 2 Генерация функций, создание траектории и управление телом
2 Генерация функций, создание траектории и управление телом
10.3 Два конечных положения жесткого тела (N = 2)
10,4 Три конечно разделенных положения твердого тела (N = 3)
10,5 Четыре конечно разделенных положения твердого тела (N = 4)
10,6 Пять конечно разделенных положений твердого тела (N = 5)
10.7 позиций точности; Структурная ошибка; Чебычевский интервал
10.8 Метод наложения
10.9 Синтез кривой-ответвителя
10.10 Когнитивные связи; Теорема Робертса-Чебычева
10.11 Уравнение Фрейденштейна
10.12 Аналитический синтез с использованием комплексной алгебры
10.13 Синтез механизмов задержки
10.14 Прерывистое вращательное движение
Задачи
11 Пространственные механизмы 110005
Введение
9000.2 Исключения для мобильности механизмов11.3 Задача анализа пространственного положения
11.4 Анализ пространственной скорости и ускорения
11,5 Углы Эйлера
11. 6 Параметры Денавита-Хартенберга
6 Параметры Денавита-Хартенберга
11.7 Матричный анализ положения матрицы преобразования
9000 и анализ ускорения11.9 Компьютерные программы для анализа обобщенного механизма
Проблемы
12 Робототехника
12.1 Введение
12.2 Топологическое расположение манипуляторов роботов
12.3 Прямая кинематика
12.4 Анализ обратного положения
12.5 Анализ обратной скорости и ускорения
12.6 Анализ силы привода робота
Проблемы динамики
Проблемы динамики 13 Анализ статических сил
13.1 Введение
13.2 Законы Ньютона
13.3 Системы единиц
13.4 Приложенные и ограничивающие силы
13,5 Диаграммы свободного тела
13,6 Условия равновесия
13,7 Элементы с двумя и тремя усилиями
13,8 Элементы с четырьмя силами
13,9 Модели силы трения
13.10 Анализ статических сил с трением
13. 11 Анализ сил прямозубых и косозубых зубчатых колес
11 Анализ сил прямозубых и косозубых зубчатых колес
13.12 Анализ сил прямозубых и конических зубчатых колес
13.13 Метод виртуальной работы
13,14 Формула столбца Эйлера
13.15 Критическая удельная нагрузка
13.16 Критическая удельная нагрузка и коэффициент гибкости
13.17 Параболическое уравнение Джонсона
Задачи
14 Анализ динамических сил
14.1 Введение
14.2 Центроиды и центры масс
14.3 Массовые моменты и продукты инерции
14.4 Силы инерции и принцип Даламбера
14.5 Принцип суперпозиции
14.6 Плоское вращение вокруг фиксированного центра
14.7 Силы и моменты сотрясения
14.8 Комплексный алгебраический подход
14.9 Уравнение движения на основе уравнения мощности
14.10 Измерение массового момента инерции
14.11 Преобразование осей инерции
14.12 Уравнения движения Эйлера
14,13 Импульс 14.14 Угловой импульс и угловой момент
Задачи
15 Анализ вибрации
15. 1 Дифференциальные уравнения движения
1 Дифференциальные уравнения движения
15.2 Вертикальная модель
15.3 Решение дифференциального уравнения
15.4 Форсирование ступенчатого входа
15.5 Фазово-плоскостное представление
15.6 Анализ фазовой плоскости
15.7 Переходные возмущения
15,8 Свободная вибрация с обнаружением вязкого демпфирования
экспериментально15.10 Представление затухающей вибрации в фазовой плоскости
15.11 Реакция на периодическое воздействие
15.12 Гармоническое воздействие
15.13 Форсирование, вызванное дисбалансом
15.14 Относительное движение
15,15 Изоляция
15,16 Метод Рэлея
15,17 Первая и вторая критические скорости вала
15,18 Торсионные системы
Проблемы
c Типы двигателей 16 Динамика двигателей 2
16.2 Диаграммы индикаторов
16.3 Динамический анализ, общий
16.4 Газовые нагрузки
16,5 Эквивалентные массы
16. 6 Сил инерции
6 Сил инерции
16.7 Нагрузки на подшипники в одноцилиндровом двигателе
16,8 Крутящий момент на коленчатом валу
16.9 Встряхивающие силы двигателей
16.10 Подсказки по вычислениям
Задачи
17 Балансировка
17,1 Статическая дисбаланс
17.3 Статические балансировочные станки
17.4 Динамический дисбаланс
17.5 Анализ дисбаланса
17.6 Динамическая балансировка
17.7 Балансировочные станки
17.8 Балансировка поля с помощью программируемого калькулятора
17.9 Балансировка одноцилиндрового двигателя
17.10 Балансировка многоцилиндровых двигателей
17.11 Аналитический метод балансировки многоцилиндровых двигателей
17.12 Балансировка рычагов
17.13 Балансировка машин
Проблемы18 Cam Dynamics
18.1 Кулачковые системы с жестким и упругим корпусом
18.2 Анализ эксцентрикового кулачка
18.3 Влияние трения скольжения
18. 4 Анализ дискового кулачка с толкателем возвратно-поступательного ролика
4 Анализ дискового кулачка с толкателем возвратно-поступательного ролика
18.5 Анализ упругих кулачковых систем
18.6 Неуравновешенность, скачок пружины и раскрутка
Проблемы
19 Маховики, регуляторы и гироскопы
19.1 Динамическая теория интеграции
Методика
19.3 Суммирование крутящего момента многоцилиндрового двигателя
19.4 Классификация регуляторов
19.5 Центробежные регуляторы
19.6 Инерционные регуляторы
19.7 Механические системы управления
19.8 Стандартные входные функции
19.9 Решение линейных дифференциальных уравнений
19.10 Анализ систем обратной связи с пропорциональной погрешностью
19.11 Введение в гироскопы
19.12 Движение гироскопа
19.13 Стабильная или регулярная прецессия
19.14 Принудительная прецессия
ПроблемыПРИЛОЖЕНИЯ
Приложение A: Таблицы
Таблица 1 Стандартные префиксы СИ
Таблица 2 Преобразование из стандартных единиц СИ в единицы СИ
Таблица 3 Преобразование единиц СИ
в обычные единицы СШАТаблица 4 Свойства областей
Таблица 5 Массовые моменты инерции
Таблица 6 Эвольвентная функция
Приложение B: Ответы на отдельные проблемы
Указатель
Глава 2.
 Механизмы и простые машины Yi Zhang
Механизмы и простые машины Yi Zhang с
Susan Finger
Stephannie Behrens
Содержание
Механизм : основные физические или химические процессы участвует или несет ответственность за действие, реакцию или другое естественное явление.
Станок : сборка деталей, передающих силы, движение и энергия заранее определенным образом.
Простая машина : любой из различных элементарных механизмов, имеющих элементы, из которых состоят все машины.Включен в К этой категории относятся рычаг, колесо и ось, шкив, наклонная плоскость, клин и винт.
Слово механизм имеет много значений. В кинематике механизм является средством
передача, управление или ограничение относительного движения (Хант 78). Движения, которые
с электрическим, магнитным и пневматическим управлением исключены из
понятие механизма. Центральная тема механизмов – жесткость.
тела соединены между собой суставами.
Станок представляет собой комбинацию жестких или устойчивых корпусов, сформированы и связаны таким образом, что они движутся с определенными относительными движениями и передать силу от источника энергии к сопротивлению, которое будет превосходить. У машины две функции: передача определенного родственника движение и передающая сила. Эти функции требуют силы и жесткость для передачи сил.
Термин механизм применяется к комбинации геометрические тела, составляющие машину или часть машины.А механизм , следовательно, можно определить как комбинацию жесткие или прочные тела, сформированные и соединенные таким образом, что они перемещаются с определенные относительные движения относительно друг друга (Ham et al. 58).
Хотя по-настоящему твердого тела не существует, многие инженеры
компоненты жесткие, потому что их деформации и искажения
ничтожно малы по сравнению с их относительными перемещениями.
сходство между станками и механизмами составляет что
- они обе комбинации твердых тел
- относительное движение между твердыми телами определено.
Разница между машиной и механизмом составляет машины преобразуют энергию для выполнения работы, а механизмы – нет. обязательно выполнять эту функцию. Срок машины в основном имеется в виду машины и механизмы. Рисунок 2-1 показывает изображение основной части дизельного двигателя. В Механизм его частей цилиндро-звено-кривошип – кривошипно-шатунный механизм . механизм , как показано на Рисунке 2-2.
Рисунок 2-1 Поперечное сечение силового цилиндр в дизельном двигателе
Рисунок 2-2 Контур скелета
2.1 Наклонная плоскость
На рис. 2-3а показан наклонный плоскость , AB – основание, BC – высота и AC наклонный
самолет . При использовании наклонной плоскости заданное сопротивление может
преодолевать с меньшей силой, чем если бы самолет не использовался. Для
Например, на рис. 2-3b, предположим, мы хотим поднять
вес 1000 фунтов через вертикальное расстояние BC = 2 фута. Если это
груз поднимался вертикально и без использования наклонных
самолет силой 1000 фунтов.пришлось бы проявить на расстоянии
ДО Н.Э. Если, однако, используется наклонная плоскость и груз перемещается
над его наклонной плоскостью переменного тока сила всего 2/3 от 1000 фунтов или 667 фунтов.
фунт необходим, хотя эта сила действует на расстоянии AC
что больше расстояния BC.
Для
Например, на рис. 2-3b, предположим, мы хотим поднять
вес 1000 фунтов через вертикальное расстояние BC = 2 фута. Если это
груз поднимался вертикально и без использования наклонных
самолет силой 1000 фунтов.пришлось бы проявить на расстоянии
ДО Н.Э. Если, однако, используется наклонная плоскость и груз перемещается
над его наклонной плоскостью переменного тока сила всего 2/3 от 1000 фунтов или 667 фунтов.
фунт необходим, хотя эта сила действует на расстоянии AC
что больше расстояния BC.
Рисунок 2-3 Наклонная плоскость
Использование наклонной плоскости требует меньшего усилия через большее расстояние, чтобы выполнить определенный объем работы.
Пусть F представляет силу, необходимую для подъема заданного веса на наклонная плоскость и W поднимаемый груз, имеем пропорцию:
(2-1)2.1.1 Винтовой домкрат
Одно из наиболее распространенных применений принципа наклонной плоскости – винт домкрат , который используется для преодоления сильного давления или подъема
тяжелый вес W с гораздо меньшей силой F , приложенной на
рукоять. R представляет длину ручки, а P шаг винта, или расстояние увеличивается за один
полный оборот.
R представляет длину ручки, а P шаг винта, или расстояние увеличивается за один
полный оборот.
Рисунок 2-4 Винтовой домкрат
Пренебрегая трением, используется следующее правило: Сила F умноженное на расстояние, которое он проходит за один полный оборот равна поднятому весу, умноженному на расстояние, на которое он подняли в то же время.За один полный оборот конец ручки описывает круг с окружностью 2 R . Это расстояние, на котором действует сила F .
Поэтому из правила выше
(2–2)а также
(2-3)Предположим, что R равен 18 дюймов, P равен 1/8 дюйма, а вес для подъема равняется 100000 фунтов, тогда усилие, требуемое при F тогда составляет 110 фунтов. Это означает, что без учета трения 110 фунтов при F поднимет 100 000 фунтов.на W , но вес поднялся движется намного медленнее, чем сила, приложенная к точке F .
2,2 Шестерни
Шестерня или зубчатое колесо во время работы может быть
рассматривается как рычаг с дополнительной функцией, которая может вращаться
непрерывно, вместо того, чтобы раскачиваться взад и вперед через короткий
расстояние.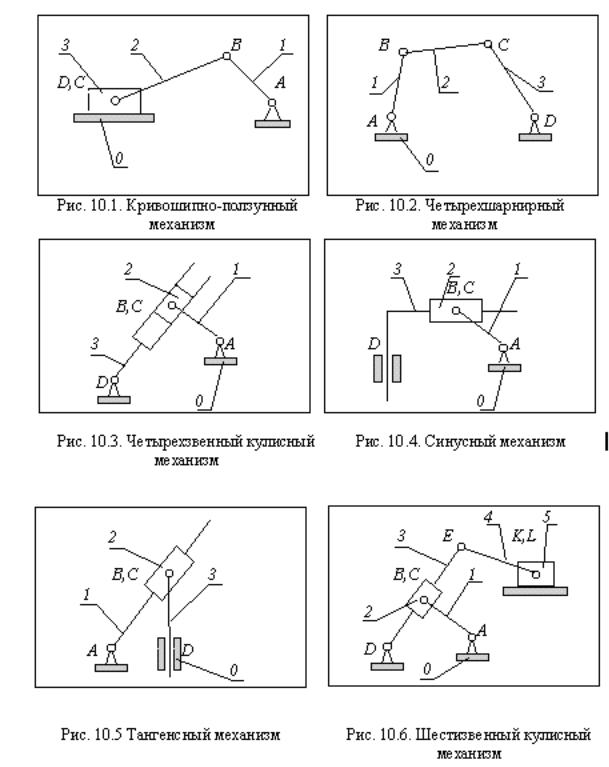 Одно из основных соотношений шестеренки – это число
зубьев, диаметра и скорости вращения шестерен. На рисунке 2-5 показаны концы двух валов A и B.
соединены 2 шестернями по 24 и 48 зубьев соответственно.Обратите внимание, что
большая шестерня сделает только пол-оборота, в то время как меньшая шестерня сделает
полный оборот. То есть соотношение скоростей (отношение скоростей)
от большого к меньшему – от 1 до 2.
Одно из основных соотношений шестеренки – это число
зубьев, диаметра и скорости вращения шестерен. На рисунке 2-5 показаны концы двух валов A и B.
соединены 2 шестернями по 24 и 48 зубьев соответственно.Обратите внимание, что
большая шестерня сделает только пол-оборота, в то время как меньшая шестерня сделает
полный оборот. То есть соотношение скоростей (отношение скоростей)
от большого к меньшему – от 1 до 2.
Рисунок 2-5 Шестерни
Шестерня, которая находится ближе к источнику питания, называется водитель , а шестерня, которая получает питание от водителя, называется ведомая шестерня .
2.2.1 Зубчатые передачи
Зубчатая передача может иметь несколько приводов и несколько ведомых шестерен.
Рисунок 2-6 Зубчатая передача
Когда шестерня A поворачивается один раз по часовой стрелке, шестерня B поворачивается 4 раза.
против часовой стрелки, а шестерня C поворачивается один раз по часовой стрелке. Следовательно, шестерня B
не изменять скорость C по сравнению с той, которая была бы, если бы была настроена
непосредственно на передачу А, но меняет направление с против часовой стрелки
по часовой стрелке.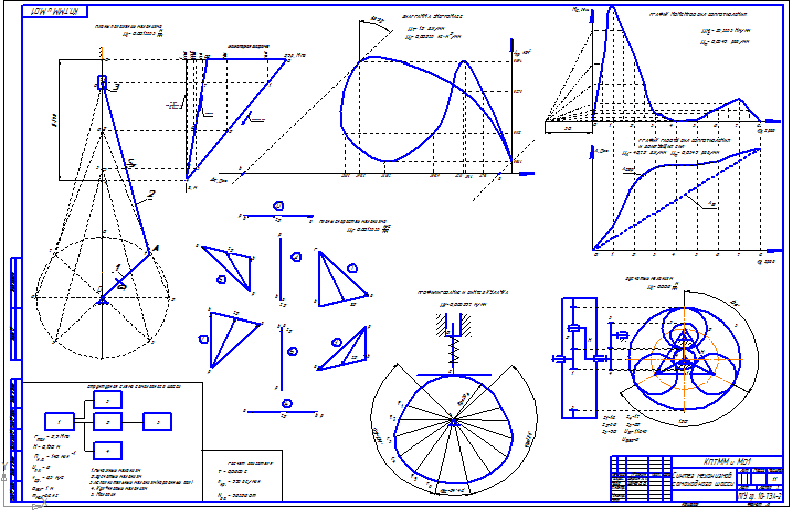
Соотношение скоростей первой и последней передач в ряду простых шестерен дозу нельзя изменить, поставив между ними любое количество передач.
На рис. 2-7 показаны составные шестерни , в которых на среднем валу две шестерни.Шестерни B и D вращаются одновременно скорости, поскольку они прикреплены (закреплены) к одному и тому же валу. Количество Зубья на каждой шестерне приведены на рисунке. Учитывая эти числа, если шестерня A вращается со скоростью 100 об / мин. по часовой стрелке, шестерня B поворачивается на 400 об / мин (оборотов в минуту) против часовой стрелки, и шестерня C поворачивает 1200 об / мин по часовой стрелке.
Рисунок 2-7
Составные шестерни2.2.2 Передаточное число
При работе с шестернями важно знать, какое количество зубьев шестерни должны быть так, чтобы они могли правильно зацепляться с зубчатой передачей.Размер зубьев соединительных шестерен должен быть точно подобран.
2.3 Ремни и шкивы
Ремни и шкивы являются важной частью
большинство машин. Шкивы не что иное, как шестерни без
зубы, и вместо того, чтобы бегать вместе, они вынуждены вести
друг друга с помощью шнуров, веревок, тросов или ремней некоторых видов.
Шкивы не что иное, как шестерни без
зубы, и вместо того, чтобы бегать вместе, они вынуждены вести
друг друга с помощью шнуров, веревок, тросов или ремней некоторых видов.
Как и в случае с шестернями, скорости шкивов обратно пропорциональны их диаметры.
Рисунок 2-8
Ремни и шкивы Шкивы также могут быть выполнены в виде блока и захвата.2,4 Рычаг
2,5 Колесо и ось
2,6 клин
2.7 КПД машин
При отработке неполадок на рычагах, , ремнях и шкивы , , наклонные плоскости и пр., мы не брали учет трения или других источников потерь энергии. Другими словами, мы предполагали, что они идеальны, хотя на самом деле это не так.К измерить производительность машины, мы часто находим ее КПД , который определяется как
(2-4)где
- = КПД
машины,
- Вт в = входная работа для станка, и
- Вт на выходе = выходная работа станка.
- Вт в = входная работа для станка, и
Содержание
Полное содержание- 1 Введение в механизмы
- 2 Механизмы и простые машины
- 2.1 Наклонная плоскость
- 2.1.1 Винтовой домкрат
- 2.2 Шестерни
- 2.2.1 Зубчатые передачи
- 2.2.2 Передаточное число
- 2.3 Ремни и шкивы
- 2,4 Рычаг
- 2,5 Рычаг
- 2,6 клин
- 2.7 Эффективность машин
- 3 Подробнее о машинах и механизмах
- 4 Основная кинематика жестких тел с ограничениями
- 5 планарных рычагов
- 6 кулачков
- 7 передач
- 8 Прочие механизмы
- Индекс
- Ссылки
- 2 Механизмы и простые машины
sfinger @ ri.cmu.edu
Практические задачи – теория механизмов и машин
Задачи
Найдите глубину резкости для следующих механизмов
Slider
Слайдер
Слайдер
Вилочный шарнир
Критерий Грасгофа, диапазон движения
Четырехзвенный рычажный механизм имеет следующее Габаритные размеры: A 0 B 0 = 2, A 0 A = 2,5, AB = 1,5, B 0 B = 3.
(а) Определите тип четырехстержневоймеханизм с использованием Grashof критерий.(б) Определите диапазон движения
эта связь, если ссылка 2 является входом.(c) Определите диапазон движения
эта связь, если ссылка 4 является входом.Четырех стержневой рычажный механизм имеет следующие Габаритные размеры: A 0 B 0 = 2, A 0 A = 2,5, AB = 1,5, B 0 B = 3. (а) Определите тип четырехцилиндрового –
стержневой механизм с использованием Критерий Грасгофа.(b) Определите диапазон
движение этой связи, если ссылка 2 - это вход.(c) Определите диапазон
движение этой связи, если ссылка 4 - это вход.
 (а) Определите тип четырехстержневой
(а) Определите тип четырехстержневойАнализ положения
Вращающийся кривошип 2 приводит в движение смещенный ползун кривошипно-шатунный механизм. Решите положение ползунок 4 как функция 2
Для каждой связи, показанной выше, а именно:
(а) Инверсия кривошипно-шатунного механизма ползуна,
(b) Вторая инверсия кривошипно-шатунного механизма ползуна,
(c) Прямоточный механизм,
(d) Механизм перетаскивания,
Найдите путь к точке P.
Определить крутящий момент отношение Т 2 / Т 6.
Найдите угловой скорость звена 7 и линейный скорость точки F на ползунке восьмизвенная связь.
Скорость точки B рычажного механизма показанное на рисунке, составляет 40 м / с. Находить скорость точки A и угловая скорость звена 3.
Найдите отношение VD 2
Кривошип 2 рычажного механизма приводится в 2 = 60 рад / сек по часовой стрелке. Найдите VB, VC, 3 и 4.
Найдите скорость точки C на ссылке 4 механизма, когда кривошип 2 при 2 = 48 рад / сек против часовой стрелки.Также найдите 3.
Найдите скорость точки C, когда кривошип 2 приводится в действие с 2 = 60 рад / с ccw. Также найдите 3 и 4.
Для 2 = 45 рад / сек против часовой стрелки найти 3 и 4 фунта стерлингов
Найдите соотношение 5 2.
Инверсия слайдера
кривошипно-шатунный механизм приводится в действие
по звену 2 при 2 =
60 рад / сек против часовой стрелки. Найдите VB,
3 и 4. Учитывая
2 = 1 рад / сек по часовой стрелке, найти 6 и VB.
Параллельный рычаг имеет противоположный рычаги равной длины. Показывать что 3.всегда равен нулю и 4 = 2. Как бы вы описали движение звена 4 относительно звена 2?
Линия 2 параллельного или поперечная навеска приводится в движение при 2 = 1 рад / сек против часовой стрелки. Найдите ВК и ВД.
Параллельная связь имеет противоположные связи равных длина. Покажи, что 3 всегда ноль и 4 = 2. Как бы вы описываете движение ссылка 4 относительно ссылки 2?
Угловая скорость звена 2 механизм тяги, показанный на цифра составляет 16 рад / сек непрерывно. Постройте полярный диаграмма скоростей для скорости точка B для всех положений кривошипа.Проверять позиции максимума и минимума скорости.
Звено 2 показанного механизма при 2 = 36 рад / сек против часовой стрелки. Находить 3 и VB.
Найдите скорость в точке C соединителя. когда кривошип 2 вращается при 2 = 30 рад / сек против часовой стрелки. Также найдите 3 и 4.
Анализ ускорения
Найдите AB (2 = 0).
Link 2 вращается с постоянной угловая скорость. Определять скорость и ускорение пункта D.
Слайд 3 переместится на слева с постоянный угловой скорость 1 см / сек.Найдите 3 и 6 в позиции показано.
При 2 = -60 рад / с, 2 = -900 рад / с 2, найти скорость и ускорение точки Б.
Заданная угловая скорость звена 2 равна постоянный найти AB, AD и 4.
O 2 A = 2 мм, O 2 O 4 = 4,5 мм, O 4 B = 2,5 мм, AB = 3,6 мм
Найдите AC, учитывая, что
O 2 O 4 = 15, 2 = -60 рад / сек, 2 = -180 рад / сек
2.
Определить: (а) Угловая скорость 3. (б) Величина скольжения скорость штифта в пазу.(c) Угловое ускорение 3.
лучших справочников – теория машин
Мы составили список из Топ-10 лучших справочников по теории машин предмета. Эти книги используются студентами ведущих университетов, институтов и колледжей. Вот полный список из лучших 10 лучших книг по теории машин вместе с обзорами.
Пожалуйста, обратите внимание, что мы приложили много усилий для исследования лучших книг по теме «Теория машин » и составили рекомендуемый список из 10 лучших книг.В таблице ниже указаны названия этих лучших книг, их авторы, издатели и объективный обзор книг по «Теории машин», а также ссылки на веб-сайт Amazon для прямой покупки этих книг. Как партнер Amazon, мы зарабатываем на соответствующих покупках, но это не влияет на наши обзоры, сравнения и перечисление этих лучших книг; таблица служит готовым списком этих лучших книг.
| 1. «Теория машин» Баллани П.Л. Рецензия на книгу «Теория машин»: эта книга дает исчерпывающее объяснение новых разработок в области кинематики и динамики машин.Он охватывает несколько тем в области машин и механизмов, включая критерии для анализа их движения, способы их синтеза и т. Д. В начале книга охватывает введение, которое включает такие основные темы, как теория, номенклатура, обозначения и методы анализа. | |
| 2. «Теория механизмов и машин» Джагдиша Лала. | |
| 3. «Механизмы и теория машин» Рао Дж. С. и Дуккипатти Р. В. Рецензия на книгу «Механизмы и теория машин»: эта книга представляет собой всестороннее исследование различных аспектов теории механизмов и машин.Он охватывает как кинетические, так и кинематические аспекты при описании основных принципов анализа и синтеза машин. Далее в нее включены такие важные темы, как гидродинамическая смазка, балансировка вращающихся частей, балансировочные машины и т. | |
4. «Теория машин» Ротанга С.С. Рецензия на книгу «Теория машин»: эта книга представляет собой подробное исследование машин и некоторых связанных с ними аспектов. Два раздела книги «Кинематика» и «Динамика машин» ясно объясняют темы с помощью примеров.В новой главе рассказывается о последних разработках в области гироскопов. Книга содержит вопросы из различных конкурсных экзаменов, которые помогают студентам проверить свое понимание при подготовке к экзаменам. Он содержит 389 примеров, 401 вопрос с несколькими вариантами ответов и 516 числовых задач, которые помогают в глубоком понимании предмета. Приложения, содержащие глоссарий терминов, также включены для облегчения изучения. Книга будет полезна студентам и преподавателям машиностроения. Приложения, содержащие глоссарий терминов, также включены для облегчения изучения. Книга будет полезна студентам и преподавателям машиностроения. | |
| 5. «Теория машин» Р. С. Хурми Рецензия на книгу «Теория машин»: эта книга является важным учебным пособием по нескольким аспектам машин, включая их работу, разработку и т. Д. Она охватывает несколько тем, начиная от кинематики движения, простого гармонического движения, скорости в механизмах и трения до ремня. и канатные приводы, зубчатые передачи, зубчатые передачи и гироскопическая пара. Также объясняются некоторые другие технические темы, такие как крутящий момент, тормоза, регуляторы, клапаны паровых двигателей, реверсивные передачи, возвратно-поступательные массы и многое другое.Суть темы поясняется иллюстрациями в виде картинок, решенными и нерешенными примерами. Это дает читателям практическое понимание. Книга будет полезна студентам, готовящимся к экзаменам U. | |
| 6. «Теория машин: кинематика и динамика» Садху Сингха. Рецензия на книгу «Теория машин: кинематика и динамика»: это исчерпывающий учебник, объясняющий два важных понятия кинематики и динамики станка.Вначале дается четкий обзор основных принципов. Введение и план каждой главы помогают читателю составить представление о содержании главы. Темы объясняются с помощью реальных примеров и задач в конце каждой главы. Книга содержит более 265 вопросов с несколькими вариантами ответов, более 300 упражнений и более 150 решенных примеров, выделенных по всей книге. Эти функции помогают в практическом понимании предмета, а также помогают студентам проверить свое понимание на экзаменах.Книга предназначена для студентов бакалавриата в области машиностроения, производства, авиации и гражданского строительства. | |
7. «Теория машин и механизмов», Гордон Р. Пеннок и Джозеф Э. Шигли, Джон Дж. Юикер. Рецензия на книгу «Теория машин и механизмов»: эта книга дает исчерпывающее объяснение новых разработок в области кинематики и динамики машин. Он охватывает несколько тем в области машин и механизмов, включая критерии анализа их движения, способы их синтеза и т. Д.Вначале книга охватывает введение, которое включает такие основные темы, как теория, номенклатура, обозначения и методы анализа. Следующие три главы посвящены методам анализа движений механизмов. Затем он охватывает такие инженерные аспекты, как выбор, спецификация, проектирование и определение размеров механизмов. В последней части рассматриваются последствия предложенной конструкции механизма. Это полезный источник знаний для студентов, изучающих машиностроительный курс по теории машин. «Теория машин и механизмов», Гордон Р. Пеннок и Джозеф Э. Шигли, Джон Дж. Юикер. Рецензия на книгу «Теория машин и механизмов»: эта книга дает исчерпывающее объяснение новых разработок в области кинематики и динамики машин. Он охватывает несколько тем в области машин и механизмов, включая критерии анализа их движения, способы их синтеза и т. Д.Вначале книга охватывает введение, которое включает такие основные темы, как теория, номенклатура, обозначения и методы анализа. Следующие три главы посвящены методам анализа движений механизмов. Затем он охватывает такие инженерные аспекты, как выбор, спецификация, проектирование и определение размеров механизмов. В последней части рассматриваются последствия предложенной конструкции механизма. Это полезный источник знаний для студентов, изучающих машиностроительный курс по теории машин. | |
| 8. «Теория машин» Томаса Бевана | |
9. «Теория машин» Бевана. «Теория машин» Бевана.Рецензия на книгу «Теория машин»: эта книга представляет собой сборник лекций, прочитанных в Манчестерском технологическом колледже. Читатели познакомятся с основами кинематики и динамики машин. Эти темы необходимо понять перед проектированием и производством любого компонента.Кроме того, в конце каждой главы приводится несколько вопросов с несколькими вариантами ответов и вопросов с краткими ответами. Эти вопросы готовят студентов к различным конкурсным экзаменам. Книга представляет собой полезное учебное пособие для студентов, готовящихся к получению высшего образования в области машиностроения и строительства. | |
| 10. «Теория механических машин» А. Гоша. Рецензия на книгу «Теория механизмов и машин»: это обширная книга, которая включает различные темы о механизмах и машинах.Он начинается с подробной информации, а затем включает такие темы, как кинематический анализ плоского механизма, размерный синтез связей и т. | |
 . Следующие три главы посвящены методам анализа движений механизмов. Затем он охватывает такие инженерные аспекты, как выбор, спецификация, проектирование и определение размеров механизмов. В последней части рассматриваются последствия предложенной конструкции механизма.Книга будет полезна практикам, студентам и преподавателям машиностроения.
. Следующие три главы посвящены методам анализа движений механизмов. Затем он охватывает такие инженерные аспекты, как выбор, спецификация, проектирование и определение размеров механизмов. В последней части рассматриваются последствия предложенной конструкции механизма.Книга будет полезна практикам, студентам и преподавателям машиностроения. Д. В книге также обсуждаются два механизма, используемые в управляющих регуляторах и гироскопах. Также включена отдельная глава, посвященная принципам теории вибраций в машинах. Каждая глава содержит задачи в конце, которые помогают студентам проверить свое понимание предмета.Также прилагается руководство по решению этих проблем. Книга будет полезна студентам бакалавриата, обучающимся по курсам теории механизмов и машин.
Д. В книге также обсуждаются два механизма, используемые в управляющих регуляторах и гироскопах. Также включена отдельная глава, посвященная принципам теории вибраций в машинах. Каждая глава содержит задачи в конце, которые помогают студентам проверить свое понимание предмета.Также прилагается руководство по решению этих проблем. Книга будет полезна студентам бакалавриата, обучающимся по курсам теории механизмов и машин. P.S.C. (Engg. Services) и A.M.I.E. (I), а также студентам Btech.
P.S.C. (Engg. Services) и A.M.I.E. (I), а также студентам Btech. Д. Другие технические темы, такие как механизм регулятора и гироскопическое действие в машинах, также подробно обсуждаются. Нерешенные задачи в конце каждой главы помогают студентам проверить свое понимание предмета. Книга будет полезна студентам бакалавриата, специализирующимся на машиностроении и производстве.
Д. Другие технические темы, такие как механизм регулятора и гироскопическое действие в машинах, также подробно обсуждаются. Нерешенные задачи в конце каждой главы помогают студентам проверить свое понимание предмета. Книга будет полезна студентам бакалавриата, специализирующимся на машиностроении и производстве.Мы создали сборник лучших справочников по «Теории машин», чтобы можно было легко увидеть список лучших книг по «Теории машин» и купить книги онлайн или офлайн.
Если нужно добавить еще какую-нибудь книгу в список лучших книг по теме «Теория машин», сообщите нам об этом.
Sanfoundry Global Education & Learning Series – Лучшие справочники!
Примите участие в конкурсе сертификации Sanfoundry, чтобы получить бесплатную Почетную грамоту.Присоединяйтесь к нашим социальным сетям ниже и будьте в курсе последних конкурсов, видео, стажировок и вакансий!Развитие теории привода стационарных сельскохозяйственных машин с рычажными механизмами – STUME Journals
MACHINES
- 1 Национальный университет биоресурсов и природопользования Украины
- 2 Таврический государственный агротехнологический университет Украина
Аннотация
Повышение эффективности сельскохозяйственных машин современного технического уровня может быть достигнуто за счет использования новых методов теории механизмов и машин при расчетах и проектировании их рабочих органов и в целом агрегатов машин.Задача исследования заключалась в разработке нового алгоритма решения второй задачи динамики рычажных механизмов с электроприводом, которые используются в современных сельскохозяйственных машинах. Новый алгоритм решения второй задачи динамики рычажных механизмов сельскохозяйственных машин, оснащенных разработан электропривод. Алгоритм находит применение при расчетах плоских рычажных механизмов стационарных сельскохозяйственных машин.
Новый алгоритм решения второй задачи динамики рычажных механизмов сельскохозяйственных машин, оснащенных разработан электропривод. Алгоритм находит применение при расчетах плоских рычажных механизмов стационарных сельскохозяйственных машин.
Ключевые слова
Список литературы
- Добровольский В.А., Заблонский К.И., Мак С.Л., Радчик С.А., Эрлих Л.Б. Детали машин. – М .: Машиностроение, 1972. – 496 с. (на русском языке).
- Еременко О.И. Определение момента инерции маховика рычажных механизмов, работающих от электропривода // Вестник Национального технического университета Украины «КПИ». Машиностроение. Выпуск 41. – Киев, 2001, С. 213-220. (на украинском языке).
- Кожевников С.Н. Теория механизмов и машин. – М .: Машиностроение, 1973. – 592 с. (на русском языке).
- Фролов К.В., Попов С.А., Мусатов А.К. и другие. Теория механизмов и машин. – М .: Высшая школа, 1987. – 504 с. (на русском языке).
Полный текст статьи
Скачать PDF
.