Дайте определение ускорения – Дайте определение угловой скорости и углового ускорения вращающегося
- Комментариев к записи Дайте определение ускорения – Дайте определение угловой скорости и углового ускорения вращающегося нет
- Советы абитуриенту
Ускорение
Ускорение – это изменение скорости. В любой точке траектории ускорения задается не только изменением абсолютного значения скорости, но и ее направлении. Ускорение определяется как предел отношении прироста скорости к интервалу времени, за которое этот прирост произошел.Ускорение – векторная физическая величина, производная скорости за время, по величине равна изменению скорости тела за единицу времени.
Поскольку скорость – производная от координаты, то ускорение можно записать, как вторую производную от координаты:
Движение тела, при котором его ускорение не меняется (ни по величине, ни по направлению), называется равноускоренным движением. В физике термин ускорения используется и в тех случаях, когда скорость тела по модулю не увеличивается, а уменьшается, т.е. тело замедляется. При замедлении вектор ускорения направлен против движения, т.е. противоположный вектору скорости.
Ускорение – одно из базовых понятий классической механики. Оно объединяет между собой кинематику и динамику. Зная ускорение, а также начальные положения и скорости тел, можно предсказать, как тела будут двигаться дальше. С другой стороны, значение ускорения определяется законами динамики через силы, действующие на тела.
1. Обозначения и единицы
Ускорение обозначается обычно латинской буквой a (от англ. acceleration ), И его абсолютная величина измеряется в СИ в метрах за квадратную секунду (м / с 2). Существует также внесистемная единица Гал (Gal), используемый в гравиметрии и равна 1 см / с 2. Часто ускорения также измеряют, выбирая за единицу ускорение свободного падения, которое обозначают латинской буквой g, то есть говорят, что ускорение составляет, например, 2g.
Часто в физике для обозначения ускорения используют две точки над обозначением координат или одну точку над символом скорости:
2. Тангенциальное и нормальное ускорения
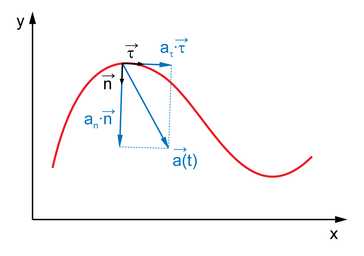
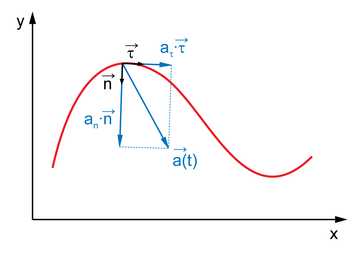
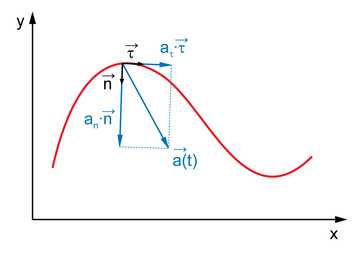
Ускорение – векторная величина. Его направление не всегда совпадает с направлением скорости. В общем случае вектор ускорения образует с вектором скорости некоторый угол и раскладывается на две составляющие. Составляющая вектора ускорения, которая направлена параллельно вектору скорости, а, следовательно, вдоль касательной к траектории, называется тангенциальным ускорением. Составляющая вектора ускорения, направленная перпендикулярно вектору скорости, а, следовательно, вдоль нормали к траектории, называется нормальным ускорением.
- .
Первый член в этой формуле задает тангенциальное ускорение, второй – нормальное, или центростремительное. Изменение направления единичного вектора всегда перпендикулярна этого вектора, поэтому второй член в этой формуле нормальный к первому.
В случае вращения тела по окружности со скоростью, не меняется по модулю, вектор ускорения перпендикулярно вектору скорости.
3. Ускорение в динамике
По второму закону Ньютона ускорение возникает вследствие воздействия на тело силы :
- ,
где – масса тела, – равнодействующая всех сил, действующих на это тело.
Таким образом, при одинаковой силе, действующей на различные тела, ускорение тела с меньшей массой будет больше, и, соответственно, ускорения массивного тела – меньше.
Если на тело, движущееся не действуют никакие силы, или действие всех сил на него уравновешена, то такое тело движется без ускорения, т.е. с постоянной скоростью.
4. Определение скорости и радиус-вектора при известном ускорении
Если известна зависимость ускорения материальной точки от времени , То ее скорость определяется интегрированием:
- ,
где – Скорость точки в начальный момент времени .
Зависимость ускорения от времени можно определить из законов динамики, если известны силы, действующие на материальную точку. Для однозначного определения скорости нужно знать ее значение в начальный момент.
Для равноускоренного движения интегрирования дает:
- .
Соответственно, повторным интегрированием можно найти зависимость радиус-вектора материальной точки от времени, если известно его значение в начальный момент :
- .
Для равноускоренного движения :
- .
Формула а = F / m, где F – сила, действующая на тело, m – масса тела.
4.1. Для релятивистского случая (СТВ)
Используя локально инерциальные системы отсчета, можно получить формальное определение ускорения через скорость в рамках релятивистской кинематики. Пусть в момент времени скорость объекта по оси имела значение (По другим осям – нулевая), а в момент времени – . Это формально соответствует ускорению этого объекта и означает, что в рамках нерелятивистской кинематики прирост скорости за этот момент времени в собственной ИСО можно выразить как . Можно представить, что есть две ИСО, имеющих относительную скорость , И записать для объекта обратное преобразование Лоренца:
.
Это уравнение можно решить относительно . Действительно, после интегрирования,
.
Полученное уравнение, опять же, можно решить, приняв во внимание, что , Можно получить:
.
Каждое из уравнений в предельном случае переходит в уравнение нерелятивистской кинематики. Действительно, из при сразу получается выражение
,
с –
,
а с –
.
5. Ускорение тела, движущегося по кругу
Если тело движется по кругу с постоянной угловой скоростью , То его ускорение направлено к центру круга и равен по абсолютной величине
- ,
где R – радиус круга, – Скорость тела.
В векторном записи:
- ,
где – радиус-вектор. .
Знак минус указывает на то, что ускорение направлено к центру круга. Такое ускорение называют центростремительным. Это редкий случай нормального ускорения. Тангенциальная составляющая ускорения при равномерном вращении равна нулю.
6. 4-вектор ускорения
В теории относительности движение с переменной скоростью тоже характеризуется определенной величиной, аналогичной ускорению, но в отличие от обычного ускорения 4-вектор ускорения является второй производной от 4-вектора координат не по времени, а пространственно-временном интервала.
- .
4-вектор ускорения всегда “перпендикулярный” 4-скорости
- .
Особенностью движения в теории относительности является то, что скорость тела никогда не может превысить значение скорости света. Даже в случае, если на тело действовать стала сила, его ускорение уменьшается с ростом скорости и стремится к нулю при приближении к скорости света.
В классической механике значение ускорения не изменяется при переходе от одной инерциальной системы отсчета к другой, то есть ускорение инваривантне по преобразований Галилея. 4-ускорение в теории относительности является 4-вектором, т.е. при преобразованиях Лоренца меняется аналогично пространственно-временным координатам.
В системе отсчета, движущейся с ускорением, на тело действует сила инерции. Общая теория относительности постулирует через принцип эквивалентности, что силу инерции невозможно отличить от гравитационного поля, что связано с равенством инерционной и гравитационной массы.
7. Измерения
Приборы для измерения ускорения называются акселерометрами. Они не измеряют ускорение непосредственно, а силу реакции опоры, которая возникает при ускоренном движении. Поскольку аналогичные силы сопротивления возникают также и в поле тяготения, то с помощью акселерометров можно измерять также и гравитацию.
Акселерографы – приборы, измеряющие и автоматически записывают (в виде графиков) значения ускорения поступательного и вращательного движения.
8. Интересные факты
Максимальное ускорение твердого тела, которое удалось получить в лабораторных условиях, составляло 10 октября g [1] [2]. Для опыта ученые применили так называемую Z-машину (Z Machine), которая создает чрезвычайно мощный импульс магнитного поля, который ускоряет в специальном канале снаряд – алюминиевую пластинку размером 30 ? 15 мм и толщиной 0,85 мм. Скорость снаряда составляла примерно 34 км / с (в 50 раз быстрее шар).
См.. также
Источники
- Федорченко А.М. Теоретическая механика. – М.: Высшая школа, 1975., 516 с.
- Гончаренко С.У. Физика: Основные законы и формулы .. – Киев: Лыбидь, 1996.
- Р. Фейнман, Р. Лейтон, М. Сэндс Фейнмановские лекции по физике. Том 1. Современная наука о природе. Законы механики.. – Москва: Мир, 1976.
- Ландау Л.Д., Лифшиц Е.М. Механика. Теоретическая физика, т.1. – Москва: Госиздат, 1958., 206 с.
nado.znate.ru
Ускорение – это… Что такое Ускорение?
Падающий мяч при отсутствии сопротивления воздуха ускоряется, то есть движется все быстрее и быстрее.Ускоре́ние (обычно обозначается , в теоретической механике ) — производная скорости по времени, векторная величина, показывающая, на сколько изменяется вектор скорости точки (тела) при её (его) движении за единицу времени (то есть ускорение учитывает не только изменение величины скорости, но и её направления).
Например, вблизи Земли падающее на Землю тело, в случае, когда можно пренебречь сопротивлением воздуха, увеличивает свою скорость примерно на 9,8 м/с каждую секунду, то есть, его ускорение равно 9,8 м/с².
Единицей ускорения в Международной системе единиц (СИ) служит метр в секунду за секунду (m/s2, м/с2), существует также внесистемная единица Гал (Gal), применяемая в гравиметрии и равная 1 см/с2.
Производная ускорения по времени, то есть величина, характеризующая скорость изменения ускорения, называется рывок:
- , где: — вектор рывка.
Вектор ускорения материальной точки в любой момент времени находится путём дифференцирования вектора скорости материальной точки по времени:
- .
Ускорение точки при прямолинейном движении
Если вектор не меняется со временем, движение называют равноускоренным. При равноускоренном движении справедливы формулы:
- .
Из вышеприведённых двух формул можно вывести ещё одну, связывающую скалярные величины:
Здесь — начальная скорость тела, — конечная скорость тела; — ускорение тела; — пройденный телом путь.
Частным случаем равноускоренного движения является случай, когда ускорение равно нулю в течение всего времени движения. В этом случае скорость постоянна, а движение происходит по прямолинейной траектории (если скорость тоже равна нулю, то тело покоится), поэтому такое движение называют прямолинейным и равномерным.
Равноускоренное движение точки всегда является плоским, а твёрдого тела — плоскопараллельным (поступательным). (Обратное, вообще говоря, не верно).
Ускорение точки при движении по окружности
Вектор ускорения
при движении точки по окружности можно разложить на два слагаемых (компоненты):
Тангенциальное ускорение — направлено по касательной к траектории (обозначается иногда и т. д., в зависимости от того, какой буквой в данной книге принято обозначать ускорение). Является составляющей вектора ускорения a. Характеризует изменение скорости по модулю.
Центростремительное или Нормальное ускорение — возникает (не равно нулю) всегда при движении точки по окружности (конечного радиуса) (также обозначается иногда и т. д.). Является составляющей вектора ускорения a, перпендикулярной вектору мгновенной скорости. Характеризует изменение скорости по направлению. Вектор нормального ускорения всегда направлен к центру окружности, а модуль равен:
Угловое ускорение — показывает, на сколько изменилась угловая скорость за единицу времени, и, по аналогии с линейным ускорением, равно:
Направление вектора здесь показывает, увеличивается или уменьшается модуль скорости. Если векторы углового ускорения и скорости сонаправлены, значение скорости растёт, и наоборот.
Ускорение точки при движении по кривой
Вектор ускорения можно разложить по сопутствующему базису :
- ,
где
, называемое бинормальным ускорением, всегда равно нулю. Это можно считать прямым следствием определения векторов : можно сказать, что они выбираются именно так, чтобы первый всегда совпадал с нормальным ускорением, второй же ортогонально первому.
Векторы и называются касательным (тангенциальным) и нормальным ускорениями соответственно.
Итак, учитывая сказанное выше, вектор ускорения всегда можно записать как:
- ,
Ускорения в твёрдом теле
Связь ускорений двух точек можно получить, продифференцировав формулу Эйлера для скоростей по времени:
- ,
где — вектор угловой скорости тела, а — вектор углового ускорения тела.
Второе слагаемое называется осестремительным ускорением.
Ускорение при сложном движении
Говорят, что материальная точка (тело) совершает сложное движение, если она движется относительно какой-либо системы отсчёта, а та, в свою очередь, движется относительно другой системы отсчёта. Тогда абсолютное ускорение тела равно сумме относительного, переносного и кориолисова:
- .
Первый закон Ньютона постулирует существование инерциальных систем отсчёта. В этих системах отсчёта равномерное прямолинейное движение имеет место в том случае, когда тело (материальная точка) не подвергается никаким внешним воздействиям в процессе своего движения. На основе этого закона возникает ключевое для механики понятие силы как такого внешнего воздействия на тело, которое выводит его из состояния покоя или влияет на скорость его движения. Таким образом, постулируется, что причиной возникновения ненулевого ускорения
Второй закон Ньютона утверждает, что ускорение материальной точки всегда пропорционально приложенной к ней и порождающей ускорение силе, причём коэффициент пропорциональности всегда один и тот же независимо от вида силового воздействия (он называется массой материальной точки):
Единицы измерения ускорения
- метр на секунду в квадрате (метр в секунду за секунду), м/с², производная единица системы СИ
- сантиметр на секунду в квадрате (сантиметр в секунду за секунду), см/с², производная единица системы СГС
| м/с2 | фут/с2 | g0 | см/с2 | |
|---|---|---|---|---|
| 1 м/с2 = | 1 | 3.28084 | 0.101972 | 100 |
| 1 фут/с2 = | 0.304800 | 1 | 0.0310810 | 30.4800 |
| 1 g0 = | 9.80665 | 32.1740 | 1 | 980.665 |
| 1 см/с2 = | 0.01 | 0.0328084 | 0.00101972 | 1 |
Измерение ускорения
Приборы для измерения ускорения называются акселерометрами. Они не измеряют ускорение непосредственно, а измеряют силу реакции (укр.)русск. опоры, которая возникает при ускоренном движении. Поскольку аналогичные силы сопротивления возникают также и в поле тяготения, то с помощью акселерометров можно измерять также и гравитацию.
Акселерографы — приборы, измеряющие и автоматически записывающие (в виде графиков) значения ускорения поступательного и вращательного движения.
Примеры ускорений
Значения ускорений различных движений:
Примечание: g ≈ 9,81 м/с2.
См. также
Примечания
- ↑ Кошкин Н.И., Ширкевич М.Г. Справочник по элементарной физике. — 10-е, испр. и доп.. — М.: Наука, 1988. — С. 61. — 256 с. — ISBN 5-02-013833-9
Ссылки
- Ландау, Л. Д., Лифшиц, Е. М. Механика. — Издание 5-е, стереотипное. — М.: Физматлит, 2004. — 224 с. — («Теоретическая физика», том I). — ISBN 5-9221-0055-6
dal.academic.ru
Ускорение – это… Что такое Ускорение?
Падающий мяч при отсутствии сопротивления воздуха ускоряется, то есть движется все быстрее и быстрее.Ускоре́ние (обычно обозначается , в теоретической механике ) — производная скорости по времени, векторная величина, показывающая, на сколько изменяется вектор скорости точки (тела) при её (его) движении за единицу времени (то есть ускорение учитывает не только изменение величины скорости, но и её направления).
Например, вблизи Земли падающее на Землю тело, в случае, когда можно пренебречь сопротивлением воздуха, увеличивает свою скорость примерно на 9,8 м/с каждую секунду, то есть, его ускорение равно 9,8 м/с².
Единицей ускорения в Международной системе единиц (СИ) служит метр в секунду за секунду (m/s2, м/с2), существует также внесистемная единица Гал (Gal), применяемая в гравиметрии и равная 1 см/с2.
Производная ускорения по времени, то есть величина, характеризующая скорость изменения ускорения, называется рывок:
- , где: — вектор рывка.
Вектор ускорения материальной точки в любой момент времени находится путём дифференцирования вектора скорости материальной точки по времени:
- .
Ускорение точки при прямолинейном движении
Если вектор не меняется со временем, движение называют равноускоренным. При равноускоренном движении справедливы формулы:
- .
Из вышеприведённых двух формул можно вывести ещё одну, связывающую скалярные величины:
Здесь — начальная скорость тела, — конечная скорость тела; — ускорение тела; — пройденный телом путь.
Частным случаем равноускоренного движения является случай, когда ускорение равно нулю в течение всего времени движения. В этом случае скорость постоянна, а движение происходит по прямолинейной траектории (если скорость тоже равна нулю, то тело покоится), поэтому такое движение называют прямолинейным и равномерным.
Равноускоренное движение точки всегда является плоским, а твёрдого тела — плоскопараллельным (поступательным). (Обратное, вообще говоря, не верно).
Ускорение точки при движении по окружности
Вектор ускорения
при движении точки по окружности можно разложить на два слагаемых (компоненты):
Тангенциальное ускорение — направлено по касательной к траектории (обозначается иногда и т. д., в зависимости от того, какой буквой в данной книге принято обозначать ускорение). Является составляющей вектора ускорения a. Характеризует изменение скорости по модулю.
Центростремительное или Нормальное ускорение — возникает (не равно нулю) всегда при движении точки по окружности (конечного радиуса) (также обозначается иногда и т. д.). Является составляющей вектора ускорения a, перпендикулярной вектору мгновенной скорости. Характеризует изменение скорости по направлению. Вектор нормального ускорения всегда направлен к центру окружности, а модуль равен:
Угловое ускорение — показывает, на сколько изменилась угловая скорость за единицу времени, и, по аналогии с линейным ускорением, равно:
Направление вектора здесь показывает, увеличивается или уменьшается модуль скорости. Если векторы углового ускорения и скорости сонаправлены, значение скорости растёт, и наоборот.
Ускорение точки при движении по кривой
Вектор ускорения можно разложить по сопутствующему базису :
- ,
где
, называемое бинормальным ускорением, всегда равно нулю. Это можно считать прямым следствием определения векторов : можно сказать, что они выбираются именно так, чтобы первый всегда совпадал с нормальным ускорением, второй же ортогонально первому.
Векторы и называются касательным (тангенциальным) и нормальным ускорениями соответственно.
Итак, учитывая сказанное выше, вектор ускорения всегда можно записать как:
- ,
Ускорения в твёрдом теле
Связь ускорений двух точек можно получить, продифференцировав формулу Эйлера для скоростей по времени:
- ,
где — вектор угловой скорости тела, а — вектор углового ускорения тела.
Второе слагаемое называется осестремительным ускорением.
Ускорение при сложном движении
Говорят, что материальная точка (тело) совершает сложное движение, если она движется относительно какой-либо системы отсчёта, а та, в свою очередь, движется относительно другой системы отсчёта. Тогда абсолютное ускорение тела равно сумме относительного, переносного и кориолисова:
- .
Первый закон Ньютона постулирует существование инерциальных систем отсчёта. В этих системах отсчёта равномерное прямолинейное движение имеет место в том случае, когда тело (материальная точка) не подвергается никаким внешним воздействиям в процессе своего движения. На основе этого закона возникает ключевое для механики понятие силы как такого внешнего воздействия на тело, которое выводит его из состояния покоя или влияет на скорость его движения. Таким образом, постулируется, что причиной возникновения ненулевого ускорения в инерциальной системе отсчёта всегда является некоторое внешнее силовое воздействие.
Второй закон Ньютона утверждает, что ускорение материальной точки всегда пропорционально приложенной к ней и порождающей ускорение силе, причём коэффициент пропорциональности всегда один и тот же независимо от вида силового воздействия (он называется массой материальной точки):
Единицы измерения ускорения
- метр на секунду в квадрате (метр в секунду за секунду), м/с², производная единица системы СИ
- сантиметр на секунду в квадрате (сантиметр в секунду за секунду), см/с², производная единица системы СГС
| м/с2 | фут/с2 | g0 | см/с2 | |
|---|---|---|---|---|
| 1 м/с2 = | 1 | 3.28084 | 0.101972 | 100 |
| 1 фут/с2 = | 0.304800 | 1 | 0.0310810 | 30.4800 |
| 1 g0 = | 9.80665 | 32.1740 | 1 | 980.665 |
| 1 см/с2 = | 0.01 | 0.0328084 | 0.00101972 | 1 |
Измерение ускорения
Приборы для измерения ускорения называются акселерометрами. Они не измеряют ускорение непосредственно, а измеряют силу реакции (укр.)русск. опоры, которая возникает при ускоренном движении. Поскольку аналогичные силы сопротивления возникают также и в поле тяготения, то с помощью акселерометров можно измерять также и гравитацию.
Акселерографы — приборы, измеряющие и автоматически записывающие (в виде графиков) значения ускорения поступательного и вращательного движения.
Примеры ускорений
Значения ускорений различных движений:[1]
Примечание: g ≈ 9,81 м/с2.
См. также
Примечания
- ↑ Кошкин Н.И., Ширкевич М.Г. Справочник по элементарной физике. — 10-е, испр. и доп.. — М.: Наука, 1988. — С. 61. — 256 с. — ISBN 5-02-013833-9
Ссылки
- Ландау, Л. Д., Лифшиц, Е. М. Механика. — Издание 5-е, стереотипное. — М.: Физматлит, 2004. — 224 с. — («Теоретическая физика», том I). — ISBN 5-9221-0055-6
dic.academic.ru
Ускорение – это… Что такое Ускорение?
Падающий мяч при отсутствии сопротивления воздуха ускоряется, то есть движется все быстрее и быстрее.Ускоре́ние (обычно обозначается , в теоретической механике ) — производная скорости по времени, векторная величина, показывающая, на сколько изменяется вектор скорости точки (тела) при её (его) движении за единицу времени (то есть ускорение учитывает не только изменение величины скорости, но и её направления).
Например, вблизи Земли падающее на Землю тело, в случае, когда можно пренебречь сопротивлением воздуха, увеличивает свою скорость примерно на 9,8 м/с каждую секунду, то есть, его ускорение равно 9,8 м/с².
Единицей ускорения в Международной системе единиц (СИ) служит метр в секунду за секунду (m/s2, м/с2), существует также внесистемная единица Гал (Gal), применяемая в гравиметрии и равная 1 см/с2.
Производная ускорения по времени, то есть величина, характеризующая скорость изменения ускорения, называется рывок:
- , где: — вектор рывка.
Вектор ускорения материальной точки в любой момент времени находится путём дифференцирования вектора скорости материальной точки по времени:
- .
Ускорение точки при прямолинейном движении
Если вектор не меняется со временем, движение называют равноускоренным. При равноускоренном движении справедливы формулы:
- .
Из вышеприведённых двух формул можно вывести ещё одну, связывающую скалярные величины:
Здесь — начальная скорость тела, — конечная скорость тела; — ускорение тела; — пройденный телом путь.
Частным случаем равноускоренного движения является случай, когда ускорение равно нулю в течение всего времени движения. В этом случае скорость постоянна, а движение происходит по прямолинейной траектории (если скорость тоже равна нулю, то тело покоится), поэтому такое движение называют прямолинейным и равномерным.
Равноускоренное движение точки всегда является плоским, а твёрдого тела — плоскопараллельным (поступательным). (Обратное, вообще говоря, не верно).
Ускорение точки при движении по окружности
Вектор ускорения
при движении точки по окружности можно разложить на два слагаемых (компоненты):
Тангенциальное ускорение — направлено по касательной к траектории (обозначается иногда и т. д., в зависимости от того, какой буквой в данной книге принято обозначать ускорение). Является составляющей вектора ускорения a. Характеризует изменение скорости по модулю.
Центростремительное или Нормальное ускорение — возникает (не равно нулю) всегда при движении точки по окружности (конечного радиуса) (также обозначается иногда и т. д.). Является составляющей вектора ускорения a, перпендикулярной вектору мгновенной скорости. Характеризует изменение скорости по направлению. Вектор нормального ускорения всегда направлен к центру окружности, а модуль равен:
Угловое ускорение — показывает, на сколько изменилась угловая скорость за единицу времени, и, по аналогии с линейным ускорением, равно:
Направление вектора здесь показывает, увеличивается или уменьшается модуль скорости. Если векторы углового ускорения и скорости сонаправлены, значение скорости растёт, и наоборот.
Ускорение точки при движении по кривой
Вектор ускорения можно разложить по сопутствующему базису :
- ,
где
, называемое бинормальным ускорением, всегда равно нулю. Это можно считать прямым следствием определения векторов : можно сказать, что они выбираются именно так, чтобы первый всегда совпадал с нормальным ускорением, второй же ортогонально первому.
Векторы и называются касательным (тангенциальным) и нормальным ускорениями соответственно.
Итак, учитывая сказанное выше, вектор ускорения всегда можно записать как:
- ,
Ускорения в твёрдом теле
Связь ускорений двух точек можно получить, продифференцировав формулу Эйлера для скоростей по времени:
- ,
где — вектор угловой скорости тела, а — вектор углового ускорения тела.
Второе слагаемое называется осестремительным ускорением.
Ускорение при сложном движении
Говорят, что материальная точка (тело) совершает сложное движение, если она движется относительно какой-либо системы отсчёта, а та, в свою очередь, движется относительно другой системы отсчёта. Тогда абсолютное ускорение тела равно сумме относительного, переносного и кориолисова:
- .
Первый закон Ньютона постулирует существование инерциальных систем отсчёта. В этих системах отсчёта равномерное прямолинейное движение имеет место в том случае, когда тело (материальная точка) не подвергается никаким внешним воздействиям в процессе своего движения. На основе этого закона возникает ключевое для механики понятие силы как такого внешнего воздействия на тело, которое выводит его из состояния покоя или влияет на скорость его движения. Таким образом, постулируется, что причиной возникновения ненулевого ускорения в инерциальной системе отсчёта всегда является некоторое внешнее силовое воздействие.
Второй закон Ньютона утверждает, что ускорение материальной точки всегда пропорционально приложенной к ней и порождающей ускорение силе, причём коэффициент пропорциональности всегда один и тот же независимо от вида силового воздействия (он называется массой материальной точки):
Единицы измерения ускорения
- метр на секунду в квадрате (метр в секунду за секунду), м/с², производная единица системы СИ
- сантиметр на секунду в квадрате (сантиметр в секунду за секунду), см/с², производная единица системы СГС
| м/с2 | фут/с2 | g0 | см/с2 | |
|---|---|---|---|---|
| 1 м/с2 = | 1 | 3.28084 | 0.101972 | 100 |
| 1 фут/с2 = | 0.304800 | 1 | 0.0310810 | 30.4800 |
| 1 g0 = | 9.80665 | 32.1740 | 1 | 980.665 |
| 1 см/с2 = | 0.01 | 0.0328084 | 0.00101972 | 1 |
Измерение ускорения
Приборы для измерения ускорения называются акселерометрами. Они не измеряют ускорение непосредственно, а измеряют силу реакции (укр.)русск. опоры, которая возникает при ускоренном движении. Поскольку аналогичные силы сопротивления возникают также и в поле тяготения, то с помощью акселерометров можно измерять также и гравитацию.
Акселерографы — приборы, измеряющие и автоматически записывающие (в виде графиков) значения ускорения поступательного и вращательного движения.
Примеры ускорений
Значения ускорений различных движений:[1]
Примечание: g ≈ 9,81 м/с2.
См. также
Примечания
- ↑ Кошкин Н.И., Ширкевич М.Г. Справочник по элементарной физике. — 10-е, испр. и доп.. — М.: Наука, 1988. — С. 61. — 256 с. — ISBN 5-02-013833-9
Ссылки
- Ландау, Л. Д., Лифшиц, Е. М. Механика. — Издание 5-е, стереотипное. — М.: Физматлит, 2004. — 224 с. — («Теоретическая физика», том I). — ISBN 5-9221-0055-6
biograf.academic.ru
Определение скоростей и ускорений точек механизма методом планов
Лекция № 5
Наиболее распространенным методом исследования является графо-аналитический метод – метод планов скоростей и ускорений.
Планом скоростей (ускорений) называют рисунок на котором в масштабе изображены векторы, равные по модулю и направлению скоростям (ускорениям) различных точек звеньев механизма в данный момент времени.
План скоростей (ускорений) построенный для исследуемого положения механизма, это совокупность нескольких планов скоростей (ускорений) отдельных точек звеньев, у которых полюса планов являются общей точкой-полюсом плана скоростей (ускорений) механизма.
Планы скоростей (ускорений) механизма могут строиться как для каждого положения отдельно, так и быть совмещенными.
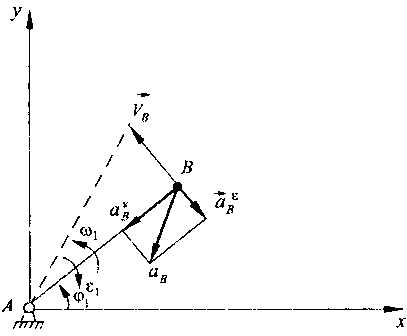
Из теоретической механики известно, что любое движение точки звена может быть составлено из переносного движения известной точки и относительного движения, искомой точки относительно известной
Движение звена относительно основной системы отсчета называется абсолютным движением. Движение звена относительно подвижной системы отсчета называется относительным движением. Движение подвижной системы отсчета относительно основной называется переносным.
При сложном движении
тела абсолютная(ое) скорость  (ускорение
(ускорение )
точки равна векторной сумме переносной(го)
)
точки равна векторной сумме переносной(го) (
( )
и относительной (го)
)
и относительной (го) скоростей (ускорений) этой точки, т.е.
скоростей (ускорений) этой точки, т.е.
(5.1)
(5.2)
где  и
и –
соответственно нормальное ускорение
в относительном движении, направленное
по радиусу вращения точки к центру
кривизны траектории (центру вращения)
и касательное ускорение, направленное
перпендикулярно радиусу вращения.
–
соответственно нормальное ускорение
в относительном движении, направленное
по радиусу вращения точки к центру
кривизны траектории (центру вращения)
и касательное ускорение, направленное
перпендикулярно радиусу вращения.
Планы скоростей и ускорений начального звена
Если начальное
звено механизма совершает вращательное
движение, то скорость его любой точки
например В,
определится: если задана частота вращения n, то 
 ,
,
тогда:
где  –
скорость точкиВ, lАВ – кратчайшее расстояние от оси вращения
до точки В,
–
скорость точкиВ, lАВ – кратчайшее расстояние от оси вращения
до точки В,  –
угловая скорость звена АВ. Скорость
точкиВ
–
угловая скорость звена АВ. Скорость
точкиВ  перпендикулярна
прямой АВ, (
перпендикулярна
прямой АВ, ( ),
может быть изображена на плане скоростей
(на рис.5.1 б) как вектор
),
может быть изображена на плане скоростей
(на рис.5.1 б) как вектор ,
модуль которого будет:
,
модуль которого будет:
«рв»
=  ,
,
где – масштабный коэффициент скоростей.
«р» – полюс плана скоростей; «в» – одноименная точка на звене.
Аналогичным образом могут быть построены скорости любых других точек, принадлежавших этому звену.
 а)
б)
в)
а)
б)
в)
Рис. Скорости точки, ускорения и ее планы
б) – план скоростей для точки В начального звена
в) – план ускорений для точкиВначального звена АВ.
На плане ускорений
– вектор ускорений точки В – и ее составляющие:
и ее составляющие:  –
нормальное и
–
нормальное и  –
касательное.
–
касательное.
 ;
;  II
АВ;
(
II
АВ;
( масштабный
коэффициент)
масштабный
коэффициент)
 ;
(
;
( -угловая
скорость звена)
-угловая
скорость звена)
ускорение
Ускорение других точек начинающего звена находятся и строятся аналогичным образом.
Определение скоростей и ускорений групп II класса методом планов
Рассмотрим группу II класса первого вида
Кинемат. схема II класс 1 вид
План скоростей II класс 1 вид
ДАНО: векторы
абсолютных скоростей точекB,
D.
векторы
абсолютных скоростей точекB,
D.
 векторы
скоростей точки С относительно точек В и D.
векторы
скоростей точки С относительно точек В и D.
Известны векторы скоростей точек В и D
концевых элементов группы, которыми
звенья 2 и 3 (присоединяются), входят в
кинематические пары со звеньями 1 и 4
основного механизма, т.е. скорости  и
и .
.
Требуется определить
вектор  скорости т. С.
скорости т. С.
Движение т. С может
быть разложено на переносно-поступательное
со скоростью точки В или точки D
и относительно-вращательное вокруг
точки В или точки D.
Тогда векторные уравнения для скорости  точки С будут иметь вид:
точки С будут иметь вид:
 решая
совместно уравнения получаем
решая
совместно уравнения получаем
 (5.3)
(5.3)
Чтобы построить
план скоростей, выбираем 
,
Масштаб  ;
;
Выбираем в качестве
полюса плана скоростей точку «р»,
где  ,
откладываем по направлению
,
откладываем по направлению и векторрв
и векторрв как
и
как
и  от
нее отрезки(рв)
и (рd),
представляющие собой скорости точек
от
нее отрезки(рв)
и (рd),
представляющие собой скорости точек  и
и .
Проведем через т.«в»
и «d»
прямые, имеющие направление векторов
относительных скоростей
.
Проведем через т.«в»
и «d»
прямые, имеющие направление векторов
относительных скоростей  и
и . Пересечение прямых даст т.«с».
Точка «с»
определит конец вектора
. Пересечение прямых даст т.«с».
Точка «с»
определит конец вектора  согласно (5.3) выражается отрезком(рс),
соединяющим т. «р»
с полученной точкой «с».
согласно (5.3) выражается отрезком(рс),
соединяющим т. «р»
с полученной точкой «с».
Величина этой скорости будет равна
Отрезки (вс)
и (dс)
представляют собой относительные
скорости  и
и в том же масштабе, т.е.
в том же масштабе, т.е.
Треугольники рвс и рdc – называются планами скоростей звеньев № 2 и № 3, Фигура рвсdр – называется планом скоростей группы ВСD,
точка «р» – плана называется полюсом плана скоростей.
Пользуясь планом
скоростей можно определить угловые
скорости  и
и звеньев № 2 и № 3. Если группа ВСD
выполнена в произвольном масштабе
звеньев № 2 и № 3. Если группа ВСD
выполнена в произвольном масштабе  то
то
 ,
,  .
.
Для определения скорости какой либо точки Е, лежащей на оси звена ВС имеем векторное уравнение
Согласно этому
уравнению из т. «в»
плана скоростей проводим направление
вектора  относительной скорости точки. Е вокруг
точки. В. т.к. относительные скорости
любых точек, лежащих на оси ВС звена 2,
относительной скорости точки. Е вокруг
точки. В. т.к. относительные скорости
любых точек, лежащих на оси ВС звена 2, ВС, то направление
ВС, то направление  совпадает с
направлением вектора скорости
совпадает с
направлением вектора скорости  ,
т.е. отрезок плана скоростей(ве),
определяющий скорость
,
т.е. отрезок плана скоростей(ве),
определяющий скорость  совпадает по направлению с отрезком(вс).
Величина отрезка определяется:
совпадает по направлению с отрезком(вс).
Величина отрезка определяется:
(1), и
(2)
разделив уравнение
(2) на уравнение (1) получаем: 
т.е. скорости точек Е и С относительно т. «В» прямо пропорциональны расстояниям этих точек до т. В.
Для определения скорости какой либо произвольной точки F на звене №3: также составляем уравнения:
Векторы  и
и скоростей т.D
и C
нам известны по величине и по направлению,
а векторы
скоростей т.D
и C
нам известны по величине и по направлению,
а векторы  и
и известны только по направлению. Вектор
известны только по направлению. Вектор отрезкуFD,
а вектор
отрезкуFD,
а вектор  .
Из т.d-плана
скоростей проводим прямую
.
Из т.d-плана
скоростей проводим прямую  FD,
а через т. «с»-
прямую
FD,
а через т. «с»-
прямую  FC,
точка пересечения «f»
определяет конец вектора
FC,
точка пересечения «f»
определяет конец вектора  полной скорости т. «F»,
отрезок «рf».
полной скорости т. «F»,
отрезок «рf».
.
Для удобства
графического построения плана скоростей
всех звеньев группы, иногда план условно
повертывают в одном и том же направлении
на угол  .
Тогда векторы относительно скоростейи
.
Тогда векторы относительно скоростейи будутII ВС и DC.
будутII ВС и DC.
Рассматривая  плана скоростей и
плана скоростей и CFD
на звене, можно видеть, что отрезки сf,
fd,dc
на плане скоростей соответственно
CFD
на звене, можно видеть, что отрезки сf,
fd,dc
на плане скоростей соответственно  к
отрезкам (CF),
(FD),(DC)
на схеме
к
отрезкам (CF),
(FD),(DC)
на схеме
т.е.  на
плане скоростей изображающий относительные
скоростигруппы на ее схеме и повернуты относительно
его на угол, в
на
плане скоростей изображающий относительные
скоростигруппы на ее схеме и повернуты относительно
его на угол, в .
Это свойство подобия фигуры относительных
скоростей на плане скоростей фигуре
звена на схеме механизма позволяет
определять скорости любых точек этого
звена не из уравнений, а графически,
построением подобных фигур.
.
Это свойство подобия фигуры относительных
скоростей на плане скоростей фигуре
звена на схеме механизма позволяет
определять скорости любых точек этого
звена не из уравнений, а графически,
построением подобных фигур.
Для проверки правильности графического построения подобных фигур на схеме и на плане скоростей: При обходе контура звена по часовой стрелке на схеме например CDF, должно совпадать в том же порядке на плане скоростей: cdf
При определении
ускорений группы II
класса первого вида, известны векторы  и
и полных ускорений точек В иD.
Для определения ускорения асточки «С»,
как и для определения скорости
полных ускорений точек В иD.
Для определения ускорения асточки «С»,
как и для определения скорости  ,точки «С», рассматриваем ее движение как сложное,
состоящее из переносного со скоростями
и ускорениями т. В и D и относительного
вращательного вокруг этих точек. Тогда
векторные уравнения для определения
ускорения точки С
,точки «С», рассматриваем ее движение как сложное,
состоящее из переносного со скоростями
и ускорениями т. В и D и относительного
вращательного вокруг этих точек. Тогда
векторные уравнения для определения
ускорения точки С
, (5.5)
где  и
и нормальные
ускорения в относительном движении
нормальные
ускорения в относительном движении
 и
и –
тангенциальные ускорения
–
тангенциальные ускорения
Решая совместно уравнения получаем
(5.6)
 и
и  – известны
– известны
Масштаб: 1мм –  (м/с2)
(м/с2)
Кинемат. схема II класс 1 вид
План ускорений II класс 1 вид
План скоростей
предполагается построенным, т.е. известны
скорости всех звеньев, тогда. Векторы
нормальных ускорений  ,
, в относительном движении может быть
определены:
в относительном движении может быть
определены:
 ;
; 
Скорости  и
и и угловые скорости
и угловые скорости и
и могут быть определены по построенному
плану скоростей, длиныl2 и l3 звеньев 2 и 3 определяют по схеме подставляя
в полученные равенства длины из плана
скоростей в масштабе
и со схемы
могут быть определены по построенному
плану скоростей, длиныl2 и l3 звеньев 2 и 3 определяют по схеме подставляя
в полученные равенства длины из плана
скоростей в масштабе
и со схемы ,
получаем
,
получаем
; (5.7)
где отрезки (вс) и (dc) взяты из плана скоростей.
В качестве полюса
плана выбираем точку « »
и откладываем отрезки (
»
и откладываем отрезки ( )
и (
)
и ( )-
в масштабе
)-
в масштабе ускорений
точек В иD.
Далее по уравнениям (5.7) вычисляем
величины ускорений
ускорений
точек В иD.
Далее по уравнениям (5.7) вычисляем
величины ускорений  и
и и откладываем из точкив и d отрезки вn2 и dn3,
и представляющие в масштабе эти ускорения.
Из полученных точек n2 и n3 проводим прямые в направлении векторов
тангенциальных ускорений
и откладываем из точкив и d отрезки вn2 и dn3,
и представляющие в масштабе эти ускорения.
Из полученных точек n2 и n3 проводим прямые в направлении векторов
тангенциальных ускорений  ,
, перпендикулярно ВС и СD.
Точка пересечения этих прямых и даст
конец вектора
перпендикулярно ВС и СD.
Точка пересечения этих прямых и даст
конец вектора  полного ускорения точки С, т.е..
Построенные фигуры
полного ускорения точки С, т.е..
Построенные фигуры и
и носят
название планов ускорений звеньев 2 и
3, а вся фигура
носят
название планов ускорений звеньев 2 и
3, а вся фигура –
называется планом ускорений группыBCD.
Точка
–
называется планом ускорений группыBCD.
Точка  –
называется началом или полюсом плана
ускорений.
–
называется началом или полюсом плана
ускорений.
Соединив точки
«в»
и «d»
плана с точкой «С»,
получим векторы полных относительных
ускорений  и
и .
Имеем:
.
Имеем:  =;
=;
Модули угловых
ускорений:  ;
; (5.8)
(5.8)
звеньев ВС и CD
Подставляя соответствующие отрезки взятые из ускорений в равенство, получаем
 ;
; 
Для определения ускорения какой-либо точки Е, лежащей на оси звена ВС воспользуемся уравнением:
Как известно из
теоремы механики при вращательном,
плоском движении звена около некоторой
точки, ускорения всех точек звена
пропорциональны радиусом-вектором,
соединяющим исследуемые точки центром
вращения, направления этих ускорений
образуют с этими радиусами постоянный
угол  , определяемый из уравненияtg
, определяемый из уравненияtg =
= ,
где
,
где  -есть
угловое ускорение звена, а
-есть
угловое ускорение звена, а –
угловая скорость звена.
–
угловая скорость звена.
Т.к. относительное
движение звена 2 около точки В есть
движение вращательное, то, очевидно,
что относительные ускорения всех точек
звена 2 будут образовывать с радиусами-
векторами, выходящими из точки В,
постоянный угол  , удовлетворяющий соотношению
, удовлетворяющий соотношению
 ,
следовательно, направление вектора
,
следовательно, направление вектора  должно
совпадать на плане ускорений с направлением
вектора
должно
совпадать на плане ускорений с направлением
вектора ,
т.е. с направлением отрезка (вс),
величина же отрезка (вl)
изображающего на плане ускорений
ускорение
,
т.е. с направлением отрезка (вс),
величина же отрезка (вl)
изображающего на плане ускорений
ускорение  ,
определяется из условия пропорциональности
ускорений радиусом-вектором, т.е.
,
определяется из условия пропорциональности
ускорений радиусом-вектором, т.е.
 ;
; 
Для определения
ускорения точки F
жестко связанной со звеном 3, можно токже
воспользоваться правилом подобия. Для
этого строим на отрезке (сd)
плана ускорений  ,
повернутый относительно
,
повернутый относительно на постоянный угол
на постоянный угол ,
определяемый по формуле:
,
определяемый по формуле: .
.
studfiles.net
Дайте определение угловой скорости и углового ускорения вращающегося
Дайте определение угловой скорости и углового ускорения вращающегося
твердого тела и установите их связь с линейными характеристиками точек вращающегося тела.
Вращательное движение – это такое движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения. Ось вращения может находиться и вне тела.
– угловая скорость вращающегося тела, где Dt – время, за которое совершается поворот . Угловая скорость w измеряется в радианах за 1с. [w] = 1радиан/с = 1с-1.
Угловая скорость направлена вдоль оси, вокруг которой вращается тело, в сторону, определяемую правилом правого винта. Модуль угловой скорости равен .
Вращение с постоянной угловой скоростью называется равномерным вращением. Если вращение является равномерным, то , где j – конечный угол поворота за время t. Равномерное вращение можно характеризовать периодом обращения T – временем, в течение которого тело делает один оборот, т.е. поворачивается на угол 2p. Тогда
,откуда .
Число оборотов единицу времени или частота вращения n равна:
– связь угловой скорости с частотой вращения.
Вектор может изменяться как за счет изменения скорости вращения тела вокруг оси, так и за счет поворота оси вращения в пространстве. Пусть за время Dt вектор получает приращение . Изменение вектора угловой скорости со временем характеризуется величиной, которая называется угловым ускорением и определяется следующим образом:
– угловое ускорение вращающегося тела.
Угловое ускорение e измеряется в радианах за 1с2, т.е. [e] = 1радиан/с2 = 1с-2.
Если ось вращения неподвижная, то угловое ускорение направлено вдоль оси вращения. При этом возможны два случая:
В частных случаях равномерного и равнопеременного вращения можно провести аналогию с соответствующими случаями прямолинейного поступательного движения:
| Поступательное движение | Вращательное движение |
| a = 0 | e = 0 |
| v =const | w=const |
| s = vt | j = wt |
| – – – – – – – – – – - | – – – – – – – – – – - |
| a = const | e= const |
| v = v0 + at | w= w0 + et |
| s = v0t + at2/2 | j= w0t + et2/2 |
Отдельные вращающегося тела имеют различные линейные скорости . Скорость каждой из точек непрерывно изменяет свое направление. Величина скорости v определяется скоростью вращения тела w и расстоянием R рассматриваемой точки от оси вращения. Пусть за малый промежуток времени Dt тело повернулось на угол Dj. Точка, находящаяся на расстоянии R от оси, проходит при этом путь Ds = RDj. Линейная скорость точки равна
,
т.е. v = wR . ( 1 )
Теперь найдем выражение, связывающее векторы и . Положение рассматриваемой точки тела будем определять радиус-вектором . Как видно из рисунка, R = rsina, и формула (1) примет вид
v = wrsina ,
откуда следует
– связь между линейной и угловой скоростью для вращающегося твердого тела.
23Что называется моментом силы, действующей на материальную точку, относительно начала координат?
Дайте определение угловой скорости и углового ускорения вращающегося
твердого тела и установите их связь с линейными характеристиками точек вращающегося тела.
Вращательное движение – это такое движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения. Ось вращения может находиться и вне тела.
– угловая скорость вращающегося тела, где Dt – время, за которое совершается поворот . Угловая скорость w измеряется в радианах за 1с. [w] = 1радиан/с = 1с-1.
Угловая скорость направлена вдоль оси, вокруг которой вращается тело, в сторону, определяемую правилом правого винта. Модуль угловой скорости равен .
Вращение с постоянной угловой скоростью называется равномерным вращением. Если вращение является равномерным, то , где j – конечный угол поворота за время t. Равномерное вращение можно характеризовать периодом обращения T – временем, в течение которого тело делает один оборот, т.е. поворачивается на угол 2p. Тогда
,откуда .
Число оборотов единицу времени или частота вращения n равна:
– связь угловой скорости с частотой вращения.
Вектор может изменяться как за счет изменения скорости вращения тела вокруг оси, так и за счет поворота оси вращения в пространстве. Пусть за время Dt вектор получает приращение . Изменение вектора угловой скорости со временем характеризуется величиной, которая называется угловым ускорением и определяется следующим образом:
– угловое ускорение вращающегося тела.
Угловое ускорение e измеряется в радианах за 1с2, т.е. [e] = 1радиан/с2 = 1с-2.
Если ось вращения неподвижная, то угловое ускорение направлено вдоль оси вращения. При этом возможны два случая:
В частных случаях равномерного и равнопеременного вращения можно провести аналогию с соответствующими случаями прямолинейного поступательного движения:
| Поступательное движение | Вращательное движение |
| a = 0 | e = 0 |
| v =const | w=const |
| s = vt | j = wt |
| – – – – – – – – – – - | – – – – – – – – – – - |
| a = const | e= const |
| v = v0 + at | w= w0 + et |
| s = v0t + at2/2 | j= w0t + et2/2 |
Отдельные вращающегося тела имеют различные линейные скорости . Скорость каждой из точек непрерывно изменяет свое направление. Величина скорости v определяется скоростью вращения тела w и расстоянием R рассматриваемой точки от оси вращения. Пусть за малый промежуток времени Dt тело повернулось на угол Dj. Точка, находящаяся на расстоянии R от оси, проходит при этом путь Ds = RDj. Линейная скорость точки равна
,
т.е. v = wR . ( 1 )
Теперь найдем выражение, связывающее векторы и . Положение рассматриваемой точки тела будем определять радиус-вектором . Как видно из рисунка, R = rsina, и формула (1) примет вид
v = wrsina ,
откуда следует
– связь между линейной и угловой скоростью для вращающегося твердого тела.
23Что называется моментом силы, действующей на материальную точку, относительно начала координат?
cyberpedia.su
УСКОРЕНИЕ – это… Что такое УСКОРЕНИЕ?
УСКОРЕНИЕ — (1) материальной точки векторная величина а, характеризующая быстроту изменения с течением времени вектора скорости v (см. (1)) точки: Согласно второму закону Ньютона (см.), ускорение прямо пропорционально результирующей механической силе F,… … Большая политехническая энциклопедия
УСКОРЕНИЕ — УСКОРЕНИЕ, величина, характеризующая быстроту изменения вектора скорости точки по его численному значению и направлению. При прямолинейном движении среднее ускорение равно отношению приращения скорости Dv к промежутку времени Dt, за который это… … Современная энциклопедия
УСКОРЕНИЕ — величина, характеризующая быстроту изменения вектора скорости точки по его численному значению и направлению. При прямолинейном движении среднее ускорение равно отношению приращения скорости ?v к промежутку времени ?t, за который это приращение… … Большой Энциклопедический словарь
УСКОРЕНИЕ — УСКОРЕНИЕ, величина, на которую увеличивается СКОРОСТЬ предмета за определенный отрезок времени. Например, скорость камня, сброшенного со скалы, увеличивается от нуля с ускорением 9,81 м в секунду за секунду за счет действия силы земного… … Научно-технический энциклопедический словарь
УСКОРЕНИЕ — УСКОРЕНИЕ, ускорения, мн. нет, ср. 1. Действие по гл. ускорить ускорять. Ускорение темпа развития строительства. Необходимо ускорение доставки телеграмм. 2. Действие по гл. ускориться ускоряться. Ускорение хода поезда. 3. Величина изменения… … Толковый словарь Ушакова
Ускорение — термин, введенный в теорию русского стихосложения А. Белым («Символизм», М., 1910) для обозначения пропуска в стихе одного из предусмотренных данным размером ударений, т. е. ипостасы (см.), пиррихием в двусложных размерах и трибрахием в… … Литературная энциклопедия
ускорение — убыстрение, форсирование, учащение, увеличение быстродействия; стретто, акцелерация, приближение, катализация, форсировка, спурт, педалирование. Ant. торможение, остановка Словарь русских синонимов. ускорение / движения, темпа: убыстрение (разг.) … Словарь синонимов
УСКОРЕНИЕ — УСКОРЕНИЕ, я, ср. 1. см. ускорить, ся. 2. В физике: величина возрастания скорости движения в единицу времени. Единица ускорения. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
УСКОРЕНИЕ — «УСКОРЕНИЕ», СССР, киностудия ИМ. А.ДОВЖЕНКО, 1984, цв. Кинороман. По мотивам романа Павло Загребельного «Разгон». Герой фильма директор НИИ, ученый кибернетик Петро Карналь. Картина построена как ретроспектива воспоминаний героя о военной юности … Энциклопедия кино
Ускорение — (Acceleration, Beschleanigung) У. есть величина, котораявыражает быстроту изменения скорости, как по величине, так и понаправлению. Изменение скорости движения точки в течение промежуткавремени от момента t до момента t1, есть геометрическая… … Энциклопедия Брокгауза и Ефрона
dic.academic.ru