Кинематика механика – “Раздел 1. Механика Тема 1.1. Кинематика. Механика. Механическое движение. Кинематика Механика – раздел физики, в котором изучается механическое движение.”. Скачать бесплатно и без регистрации.
- Комментариев к записи Кинематика механика – “Раздел 1. Механика Тема 1.1. Кинематика. Механика. Механическое движение. Кинематика Механика – раздел физики, в котором изучается механическое движение.”. Скачать бесплатно и без регистрации. нет
- Советы абитуриенту
Что такое кинематика — Науколандия
Кинематика, наряду с динамикой, является разделом механики, которая, в свою очередь, является частью физики. Механика изучает механическое движение тел, изучает способы его описания, а также исследует причины возникновения механического движения. Кинематика же, как раздел механики, изучает только механическое движение тел и способы его описания безотносительно причин возникновения этого движения. Причины возникновения движения рассматривает другой раздел механики — динамика.
Что такое механическое движение в кинематике, и чем механическое движение отличается от просто движения? Дело в том, что в обиходе под движением мы можем понимать что угодно, в том числе различные метафоры («полет мысли», «ход эволюции» и т. п.). Понятие механического движения более точное. Оно подразумевает изменение положения (движение) какого-либо тела или его частей относительно других тел, происходящее за какой-то промежуток времени
В кинематике, да и во всей механике, важное место занимает понятие тела. Если его размерами можно пренебречь, то мы имеем дело с точечным телом. Например, если автомобиль едет из города А в город Б, и мы изучаем такие параметры его движения как скорость и время, то нас не будут интересовать его размеры и масса, так как они не играют никакой роли (ну или почти не играют).
Точечные тела по-другому называют материальными точками. При движении такие тела в каждый конкретный момент времени можно считать находящимися в какой-либо точке пространства.
Понятие точечного тела облегчает исследования в кинематике.
Однако в ряде механических движений использование понятия точечного тела неуместно. Например, требуется описать движение грузовика при повороте. В данном случае, мы не можем принять его за материальную точку, так как здесь нас интересует различие в движении его честей и их положение относительно друг друга в пространстве.
Таким образом, кинематика описывает движения тел, определяет точки пространства, в которых они находятся (или их части), а также моменты времени, когда тела (или их части) находятся в соответствующих точках пространства.
Кинематика изучает механическое движение. Под механическим движением понимается изменение положения тела в пространстве относительно других тел с течением времени. Для описания механического движения вводятся система отсчета, состоящая из системы координат, тела отсчета и часов.
В кинематике движение описывается тремя способами: табличным, графическим и аналитическим (уравнением).
В кинематике в первую очередь изучаются наиболее простые типы движения: равномерное прямолинейное и равноускоренное прямолинейное (в том числе свободное падение).
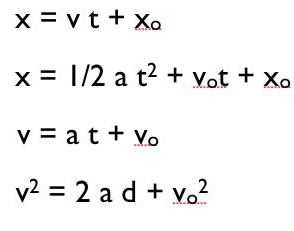
При равномерном прямолинейном движении тело за любые равные промежутки времени проходит равные расстояния в одном и том же направлении. При таком движении координата тела вычисляется по формуле x = x
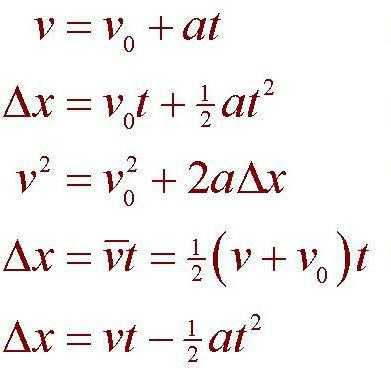
При равноускоренном прямолинейном движении тело за любые равные промежутки времени изменяет значение своей скорости на одну и ту же величину. Скорость тела вычисляется по формуле v = v0 + a · t. Ускорение определяется как изменение значения скорости за единицу времени. При равноускоренном прямолинейном движении постоянно именно ускорение, но не скорость. Если ускорение больше нуля, то тело разгоняется (его скорость увеличивается). Если ускорение меньше нуля, то тело тормозит (при этом скорость уменьшается).
Свободное падение по вертикали является частным случаем равноускоренного прямолинейного движения. При этом движении ускорение равно 9,8 м/с2. Обозначается буквой g и называется ускорением свободного падения.
scienceland.info
Кинематика – наука о движении.
Кинематика
Кинематика точки
Кинематика – часть теоретической механики, в которой изучаются движения материальных тел без учета их масс и действующих на них сил.
Когда в механике говорят о движении тела, то подразумевают под этим изменение с течением времени его положения в пространстве по отношению к другим телам.
Обычно с телом, по отношению к которому изучают движение, связывают какую-нибудь систему координат, которую вместе с выбранным способом измерения времени называют системой отсчета. Если координаты всех точек тела в выбранной системе отсчета остаются неизменными во времени, то тело находится в покое.
В мире все находится в непрерывном движении, поэтому все движения являются относительными, однако условно можно представить себе и абсолютное движение, например, движение по отношению к Земле.
Итак, движение тело совершается в пространстве с течением времени. Пространство и время, как и движение, согласно учению диалектического материализма – формы существования материи.
Классическая механика полагает, что пространство и время имеют абсолютный, независимый друг от друга характер, и что их свойства не зависят от распределения и движения материи.
Такая точка мировоззрения господствовала в науке до начала XX века, пока гениальный А. Эйнштейн (1879-1955) не поставил ее под сомнение своей теорией относительности. Этот человек сломал вековое представление человечества о самом главном – об абсолютности времени и пространства. Теория относительности Эйнштейна – это современная физическая теория пространства и времени, связывающая эти доселе незыблемые независимые постулаты с движением, массой и энергией.
До А. Эйнштейна считалось, что все в мире относительно. Если тело движется по отношению к какой-либо подвижной системе, то оно имеет другой характер движения по отношению к той системе, относительно которой движется данная система. Это утверждение являлось одним из китов, на которых восседала наука до начала прошлого века.
Теория относительности Эйнштейна основывается на том, что скорость света является постоянной величиной, не зависящей от скорости источника этого света. На основании этого противоречащего здравому смыслу вывода можно утверждать, что и пространство, и время – суть понятия относительные, зависящие от скорости света.
Тем не менее, несмотря на открытия Эйнштейна, классическая механика не потеряла свою актуальность, так как при скоростях движения, далеких от скорости света, результаты, даваемые классической механикой, ничтожно мало отличаются от результатов механики теории относительности и вполне пригодны для практики. Можно сказать, что классическая механика является частным случаем механики теории относительности, предполагающая упрощенные расчеты с допустимыми погрешностями.
***
Основные определения кинематики
Чтобы понять смысл определений кинематики следует ознакомиться с понятиями и определениями другого раздела технической механики – теорией механизмов и машин, которая занимается приложением законов теоретической механики для практических расчетов деталей, механизмов и машин.
Механизмом называется совокупность связанных между собой тел, имеющих определенные движения и служащих для передачи и преобразования движения.
Машиной называют механизм или сочетание механизмов, служащих для преобразования энергии (энергетические машины), изменения формы, свойств, состояния и положения предмета труда (рабочие машины), или для сбора, переработки и использования информации (информационные машины).
Таким образом, любая машина состоит из одного или нескольких механизмов, но не всякий механизм является машиной, т. е. машина – понятие более широкое.
Простейшей частью любой машины является ее звено – одно тело или неизменяемое во время работы машины сочетание группы тел.
Два звена, соединенные между собой и допускающие относительное движение, называются кинематической парой.
Кинематические пары бывают низшие и высшие. Звенья низших пар соприкасаются по поверхностям (поступательные, вращательные и винтовые пары), звенья высших пар соприкасаются по линиям и точкам (зубчатые пары, подшипники качения и т. п.).
Совокупность кинематических пар называется кинематической цепью.
Кинематические пары и цепи могут быть плоскими и пространственными. Механизм – это кинематическая цепь, у которой одно из звеньев лишено движения (закреплено). Такое звено называют станиной или стойкой.
Звено, вращающееся вокруг неподвижной оси, называют кривошипом, качающееся вокруг неподвижной оси – балансиром или коромыслом.
Звено, совершающее сложное движение параллельно какой-то плоскости, называют шатуном. Звено, совершающее возвратно-поступательное движение по станине или стойке, называют ползуном.
Ведущим звеном механизма считается то, которому извне сообщается определенное движение, передаваемое посредством этого звена другим звеньям, называемым ведомыми.
Кинематика изучает закономерности относительного движения и перемещения отдельных звеньев механизмов, без учета сил, вызывающих эти движения и перемещения.
Основными физическими величинами, которыми оперирует кинематика, являются расстояние (длина) и время. Единицей измерения длины в системе СИ является метр (м), единицей измерения времени – секунда (с).
***
Способы задания движения точки
Знание законов движения тела означает знание законов движения каждой его точки, поэтому изучение кинематики основывается на изучении геометрии движения точки.
Траекторией точки называется множество (геометрическое место) положений движущейся точки в рассматриваемой системе отсчета. Проще говоря, траектория движения – это линия, которую описывает подвижная точка относительно выбранной системы отсчета. В зависимости от формы траектории различают прямолинейное и криволинейное движение.
Движение любой точки тела можно описать (задать) тремя способами – естественным, векторным и координатным (см. рисунок 1).
Естественный способ (рис. 1а) заключается в том, что движение точки задается ее траекторией, началом отсчета и уравнением движения по этой траектории (законом движения).
В общем виде уравнение движения записывается так: s = f(t), где s – расстояние от точки до начального положения (начала отсчета), являющееся функцией времени; t – время движения точки от начального отсчета.
Зная траекторию и закономерность (уравнение) движения точки по этой траектории, можно в любой момент времени определить, где она находится.
При своем движении точка проходит некоторый путь, который также является функцией времени. Следует отметить, что путь, пройденный точкой, совпадает с расстоянием от начала отсчета лишь в том случае, если траектория движения точки представляет собой прямую линию, и точка движется по ней в одном направлении, а начало движения точки совпадает с началом отсчета.
Векторный способ (рис. 1б) основывается на том, что положение точки в пространстве однозначно определяется радиусом-вектором r, проведенным из некоторого неподвижного центра к данной точке. При этом положение точки в данный момент времени определяется направлением и модулем вектора. Математически функция изменения радиуса-вектора от времени записывается так:
r = rf(t)
Координатный способ (рис. 1в) заключается в том, что движение точки задается движением ее проекций вдоль осей координат. В общем виде уравнение движения точки можно записать следующим образом:
x = f(t), y = f1(t), z = f2(t).
Зная уравнения движения точки в координатной форме, можно, подставив в эти уравнения время, определить положение проекций точки, а следовательно, и самой точки в любой момент времени.
Если точка движется в плоскости, то для определения ее местоположения в данный момент времени достаточно знать две координаты, если движение происходит по прямой – достаточно одной координаты.
***
Скорость и ускорение
Правильные ответы на тестовые вопросы раздела “Кинематика”:
Тест №1 1-4-1-2-3
Тест №2 3-3-2-4-1
Тест №3 2-3-1-4-4
Тест №4 4-1-2-3-2
Тест №5 2-4-1-1-4
Тест №6 3-1-2-4-4
k-a-t.ru
Теоретическая механика кинематика
М
2407
инистерство транспорта Российской ФедерацииФедеральное агентство железнодорожного транспорта
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
Самарский государственный университет путей сообщения
Кафедра механики
Методические указания и задания
к выполнению контрольных и расчетно-графических работ
для студентов технических специальностей
очной и заочной форм обучения
Составители: Ю. Д. Карышев
Л. В. Кудюров
Самара
2 009
УДК 531/534
Теоретическая механика. Кинематика : методические указания и задания к выполнению контрольных и расчетно-графических работ для студентов технических специальностей очной и заочной форм обучения / составители : Ю. Д. Карышев, Л. В. Кудюров. – Самара : СамГУПС, 2009. – 34 с.
Утверждены на заседании кафедры 03.06.2009 г., протокол № 11.
Печатаются по решению редакционно-издательского совета СамГУПС.
Приведены методические указания и задания к выполнению контрольных и расчетно-графических работ по кинематике курса теоретической механики, предназначенные для студентов технических специальностей Самарского государственного университета путей сообщения всех форм обучения.
Составители: Ю. Д. Карышев
Л. В. Кудюров
Рецензенты: к.т.н., доцент кафедры «Механика» СамГУПС Е. В. Глобенко;
к.ф-м.н., доцент кафедры «Механика» СамГТУ В. А. Бруяка
Редактор И. М. Егорова
Компьютерная верстка Е. А. Самсонова
Подписано в печать 08.10.2009. Формат 60×90 1/16.
Усл. печ. л. 2,1. Тираж 200 экз. Заказ № 188.
© Самарский государственный университет путей сообщения, 2009
Общие указания к выполнению контрольных и расчетно-графических работ
Перечень задач, входящих в контрольные и расчетно-графические работы, выдается преподавателем в зависимости от специальности студента. Номер рисунка к задаче определяется по последней цифре шифра студента (номера зачетной книжки), а номер условия в таблице – по предпоследней.
При выполнении работ записи, чертежи, схемы должны быть выполнены в определенном масштабе, аккуратно. Условие задачи и величины, подлежащие определению, приводятся в краткой записи. Решение задач должно сопровождаться всеми необходимыми пояснениями и обосновываться ссылками на соответствующие теоремы или иные теоретические положения, на основе которых производится решение.
На рисунках должны быть указаны направления векторов, которые определены в результате решения задачи.
Защита проводится в часы консультаций. Студент должен знать основы теории по теме работы, владеть методикой решения задач данного типа.
Основные понятия и методы кинематики
Кинематикой называется раздел механики, в котором изучается движение материальных тел в пространстве с чисто геометрической точки зрения, то есть вне связи с силами, определяющими это движение.
Под движением в механике понимается изменение с течением времени положения данного тела в пространстве по отношению к другому телу, которое называют телом отсчета. С телом отсчета можно связать некоторую систему координат, которую называют системой отсчета, и изучать движение тела по отношению к ней. Если тело не перемещается по отношению к выбранной системе координат, то говорят, что оно находится в покое. При движении тела все его точки в общем случае совершают различные движения. Поэтому изучению движения тела должно предшествовать изучение движения точки.
studfiles.net
Что такое кинематика? Раздел механики, изучающий математическое описание движения идеализированных тел
Что такое кинематика? С ее определением впервые начинают знакомиться ученики средних школ на уроках физики. Механика (кинематика является одним из ее разделов) сама составляет большую часть это науки. Обычно ее преподносят ученикам первой в учебниках. Как мы и сказали, кинематика является подразделом механики. Но раз уж речь зашла о ней, то поговорим об этом несколько подробнее.
Механика как часть физики
Само слово “механика” имеется греческое происхождение и дословно переводится как искусство построения машин. В физике она считается разделом, который изучает движение так называемых нами материальных тел в разноразмерных пространствах (то есть, движение может происходить в одной плоскости, на условной координатной сетке или же в трехмерном пространстве). Изучение взаимодействия между материальными точками – одна из задач, которые выполняет механика (кинематика – исключение их этого правила, поскольку она занимается моделированием и разбором альтернативных ситуаций без учета воздействия силовых параметров). При всем этом следует отметить, что соответствующий раздел физики подразумевает под движением изменение положения тела в пространстве с течением времени. Применимо такое определение не только к материальным точкам или телам в целом, но и к их частям.
Понятие кинематики
Название этого раздела физики также имеет греческое происхождение и дословно переводится как “двигаться”. Таким образом, мы получаем первоначальный, еще не сформированный по-настоящему ответ на вопрос о том, что такое кинематика. В данном случае можно говорить о том, что раздел изучает математические способы описания тех или иных видов движения непосредственно идеализированных тел. Речь идет о так называемых абсолютно твердых телах, об идеальных жидкостях, и, конечно же, о материальных точках. Очень важно помнить о том, что при применении описания причины движения не учитываются. То есть, рассмотрению не подлежат такие параметры, как масса тела или сила, которая оказывает влияние на характер его движения.
Основы кинематики
Они включают в себя такие понятие, как время и пространство. В качестве одного из наиболее простых примеров можно привести ситуацию, когда, допустим, материальная точка движется по окружности определенного радиуса. В этом случае кинематика будет приписывать обязательное существование такой величины, как центростремительное ускорение, которое по вектору направлено от самого тела к центру окружности. То есть, вектор ускорения в любой из моментов времени будет совпадать с радиусом окружности. Но даже в этом случае (при наличии центростремительного ускорения) кинематика не будет указывать на то, какую природу имеет та сила, которая стала причиной его появления. Это уже действия, которые разбирает динамика.
Какой бывает кинематика?
Итак, ответ на то, что такое кинематика, мы, по сути, дали. Она представляет собой раздел механики, который изучает способы описания движения идеализированных объектов без изучения силовых параметров. Теперь же поговорим о том, какой может быть кинематика. Первый ее тип – классическая. В ней принято считать абсолютными пространственные и временные характеристики определенного вида движения. В роли первых предстают длины отрезков, в роли последних – временные промежутки. Иными словами, можно говорить о том, что эти параметры остаются независимыми от выбора системы отсчета.
Релятивистская

Вторым типом кинематики является релятивистская. В ней между двумя соответствующими событиями временные и пространственные характеристики могут изменяться, если осуществляется переход из одной системы отсчета в другую. Одновременность происхождения двух событий в таком случае также принимает исключительно относительный характер. В этом виде кинематики два отдельных понятия (а речь идет о пространстве и времени) сливаются в одно. В ней величина, которую обычно называют интервалом, становится инвариантной относительно Лоренцовских преобразований.
История создания кинематики

Нам удалось разобраться с понятием и дать ответ на вопрос о том, что такое кинематика. Но какова же была история ее возникновения как подраздела механики? Вот об этом сейчас и следует поговорить. Достаточно продолжительное время все понятия этого подраздела базировались на работах, которые были написаны еще самим Аристотелем. В них существовали соответствующие утверждения о том, что скорость тела при падении прямо пропорционально численному показателю веса того или иного тела. Также упоминалось, что причиной движения является непосредственно сила, а при ее отсутствии ни о каком движении и речи быть не может.
Опыты Галилея
Работами Аристотеля в конце шестнадцатого века заинтересовался знаменитый ученый Галилео Галилей. Он принялся изучать процесс свободного падения тела. Можно упомянуть о его опытах, которые он проводил на Пизанской Башне. Также ученый изучал процесс инерции тел. В конце концов Галилею удалось доказать, что в своих работах Аристотель ошибался, и он допустил целый ряд ошибочных выводов. В соответствующей книге Галилей изложил итоги проведенных работ с доказательствами ошибочности выводов Аристотеля.
Современная кинематика, как считается нынче, зародилась в январе 1700-ого года. Тогда перед Французской Академией наук выступил Пьер Вариньон. Он же привел первые понятия ускорения и скорости, написав и объяснив их в дифференциальном виде. Немного позднее на вооружение некоторые кинематические представления к сведению принял и Ампер. В восемнадцатом веке он использовал в кинематике так называемое вариационное исчисление. Специальная теория относительности, созданная еще позже, показывала, что пространство, как и время, не абсолютно. В то же время указывалось, что скорость может быть принципиально ограниченной. Именно такие основания подтолкнули кинематику к развитию в рамках и понятиях так называемой релятивистской механики.
Понятия и величины, используемые в разделе
Основы кинематики включают в себя несколько величин, которые применяются не только в теоретическом плане, но и имеют место в практических формулах, применяемых при моделировании и решении определенного спектра задач. Познакомимся с этими величинами и понятиями подробнее. Начнем, пожалуй, с последних.
1) Механическое движение. Определяется как изменения пространственного положения определенного идеализированного тела относительно других (материальных точек) в ходе изменения временного интервала. При это на тела, которые упоминаются, имеют между собой соответствующие силы взаимодействия.
2) Система отсчета. Кинематика, определение которой мы дали ранее, базируется на использовании системы координат. Наличие ее вариаций является одним из необходимых условий (вторым условием является применение приборов или средств для измерения времени). Вообще система отсчета необходима для успешного описания того или иного вида движения.
3) Координаты. Являясь условным мнимым показателем, неразрывно связанным с предыдущим понятием (системой отсчета), координаты представляют собой не что иное, как способ, при помощи которого определяется положение идеализированного тела в пространстве. При этом для описания могут быть применены цифры и специальные символы. Координатами нередко пользуются разведчики и артиллеристы.
4) Радиус-вектор. Это физическая величина, которую на практике применяют для задания положения идеализированного тела с оглядкой на первоначальное положение (и не только). Проще говоря, берется определенная точка и она фиксируется для условности. Чаще всего это начало координат. Так вот, после этого, допустим, идеализированное тело из это точки начинает движение по свободной произвольной траектории. В любой момент времени мы можем соединить положение тела с началом координат, и полученная прямая будет представлять собой не что иное как радиус-вектор.
5) Раздел кинематики использует понятие траектории. Она представляет собой обыкновенную непрерывную линию, которая создается в ходе движения идеализированного тела при произвольном свободном движении в разноразмерном пространстве. Траектория, соответственно, может быть прямолинейной, круговой и ломанной.
6) Кинематика тела неразрывно связана с такой физической величиной как скорость. На деле это векторная величина (очень важно помнить о том, что понятие скалярной величины к ней применимо только в исключительных ситуациях), которая будет давать характеристику быстроты изменения положения идеализированного тела. Векторной ее принято считать в силу того, что скорость задает направление происходящего движения. Для использования понятия необходимо применять систему отсчета, как и говорилось ранее.
7) Кинематика, определение которой рассказывает о том, что она не рассматривает причины, вызывающие движение, в определенных ситуациях рассматривает и ускорение. Оно также является векторной величиной, которая показывает, насколько интенсивно будет изменяться вектор скорости идеализированного тела при альтернативном (параллельном) изменении единицы времени. Зная одновременно, в какую сторону направлены оба вектора – скорости и ускорения – можно сказать о том, какой характер имеет движение тела. Оно может быть либо равноускоренным (вектора совпадают), либо равнозамедленным (вектора разнонаправлены).
8) Угловая скорость. Еще одна векторная величина. В принципе, ее определение совпадает с аналогичным, которое мы дали ранее. На самом деле, разница заключается только в том, что ранее рассмотренный случай происходил при движении по прямолинейной траектории. Тут же мы имеем круговое движение. Это может быть аккуратная окружность, а также эллипс. Аналогичное понятие дается и для углового ускорения.
Физика. Кинематика. Формулы
Для решения практических задач, связанных с кинематикой идеализированных тел, существует целый перечень самых разных формул. Они позволяют определить пройденное расстояние, мгновенную, начальную конечную скорость, время, за которое тело прошло ту или иную дистанцию, а также многое другое. Отдельным случае применения (частным) являются ситуации с смоделированным свободным падением тела. В них ускорение (обозначается буквой а) заменяется на ускорение свободного падения (буква g, численно равняется 9,8 м/с^2).
Итак, что же мы выяснили? Физика – кинематика (формулы которой выводятся одна из другой) – этого раздела применяется для описания движения идеализированных тел без учета силовых параметров, становящихся причинами возникновения соответствующего движения. Читатель всегда может ознакомиться с данной темой подробнее. Физика (тема “кинематика”) является очень важной, поскольку именно она дает основные понятия о механике как глобальном разделе соответствующей науки.
fb.ru
Что изучает кинематика? Понятия, величины и задача
Что изучает кинематика? С этим вопросом почти сразу же сталкиваются ученики седьмых классов, только начиная изучение физики. Сегодня мы поговорим о том, что изучает кинематика, какие понятия в ней являются наиболее важными. Рассмотрим случаи и основы этого раздела физики, разберемся с тем, какие формулы в ней можно применять и в каких случаях это следует делать.
Что изучает механика, кинематика, динамика?

Прежде всего давайте проведем, так сказать, демаркационные линии между этими тремя понятиями. Механика является одним из физических разделов. О ней можно сказать, что сама механика занимается изучением законов перемещения тел. Но подобные определения читатель может встретить и тогда, когда речь идет о кинематике с динамикой.
Так в чем же разница?
Давайте попробуем для начала разобраться с тем, что изучает кинематика и что эта наука собой представляет. По сути дела, кинематика никогда не была самостоятельной. Она есть не что иное, как раздел механики. Всего их три: кинематика, динамика и статика. Все эти три раздела одинаково относятся к механической категории, то есть изучают взаимодействия тел и особенности их перемещения. Однако каждая из них имеет характерные особенности.
Тонкости этих разделов
Кинематика, наверное, является наиболее интересным разделом с точки зрения решения задач. Огромное множество комбинаторных решений, действительно огромный простор для их планирования – все это становится краеугольными камнями, на которых базируется популярность кинематики. Кстати, открыв даже тесты для подготовки к экзамену в 9-ом классе, мы сразу же можем наткнуться на простые примеры. Говоря о том, что изучает кинематика, можем упомянуть, что она рассматривает особенности движения тел без учета сил взаимодействий.

Немного сложнее дело обстоит с таким разделом механики, как динамика. В ней также рассматривается движение тел и фигурируют соответствующие величины. Это, например, скорость движения, расстояние, время. Но появляется и ряд сторонних терминов. Здесь простыми законами движения не отделаешься, придется рассматривать механическую систему с учетом сил, действующих на то или иное тело. А вот статика уже изучает правила равновесия в механических системах. Там появляются не просто тела, а рычаги и прочие элементы.
Что составляет основу кинематики?

Итак, мы выяснили, что кинематика изучает движение тел без оглядки на силы, которые действуют на материальные точки. Но что же легло в основу этого раздела механики, кроме основных законов? Понятия и определения – это, конечно, хорошо, но ведь одной теорией при решении задач мы не сможем пользоваться. По крайней мере, чтобы достичь положительного или итогового результата, нам придется прибегнуть к формулам. А чтобы это сделать, сначала разберемся с величинами, которые в них будут фигурировать.
Основные величины, используемые в задачах по кинематике
Для начала хотим напомнить читателям, что они могут иметь неординарный характер. Давайте начнем с простой величины, которую мы называем расстоянием. Это скалярная величина. То есть имеющая только определенное значение. Три метра, на которые откатился мячик. 25 метров, которые проплыл спортсмен. Десять километров, пройденные человеком за целый день. Все это – численные значения величины, которую мы называем расстоянием.
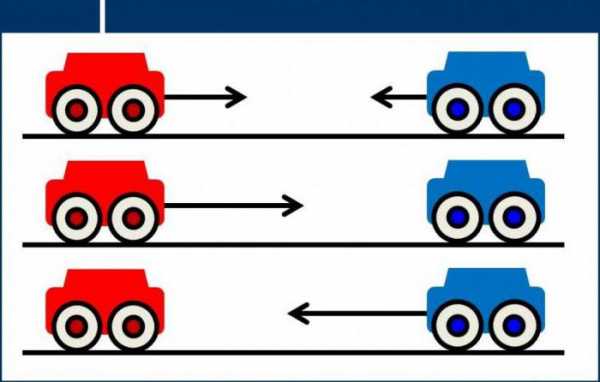
Чуть по-другому дело обстоит со скоростью и ускорением, которые в кинематике (да и вообще) имеют двоякую природу. С одной стороны, мы можем дать скорости численное значение. Пусть это будет пять, десять, двадцать метров в секунду. Но ведь скорость имеет и направление. Оно совпадает с направлением движения тела, это ведь очевидно. Аналогично дело обстоит и с ускорением. Однако скорость и ускорение могут быть направлены в разные стороны. При этом тело будет замедляться. Представьте себе, что автомобиль только начинает ехать, с каждой секундой набирая скорость. При этом скорость и ускорение направлены в одну сторону, за счет чего скорость тела увеличивается с каждой секундой. А вот когда происходит торможение, вектора становятся направленными в разные стороны.
Кинематика – раздел механики, изучающий движение тел. Но каким может быть изучение, если мы не будем использовать для этого временные интервалы? Вот она – еще одна величина, используемая для решения задач и описания законов в этом разделе физики. Она, наряду с расстоянием, ускорением и скоростью, входит в некоторые формулы, наиболее часто используемые для приведения решений. Давайте рассмотрим достаточно простую задачу на эту тему, чтобы окончательно закрепить на практике полученную ранее в ходе статьи теорию.
Задача

Для проверки характеристик автомобиля выделяют стометровый отрезок идеальной дороги. Известно, что его ускорение равно пяти метрам на секунду в квадрате. Узнайте, за какое время автомобиль сможет пройти указанное расстояние, приняв во внимание то, что движение начинается из состояния покоя.
Итак, поскольку кинематика – это раздел механики, изучающий законы движения тел, мы будем пользоваться соответствующими формулами. В общем случае она выглядит так: S = VoT +(-)(at^2)/2. Но мы для нашей задачи проведем изменение вида. Сказано, что движение начинается из состояния покоя. Значит, начальная скорость равна нулю. Следовательно, произведение скорости на время VoT будет равно нулю. Раз уж автомобиль разгоняется, для формулы свойственен знак “+”. В итоге она примет следующий вид: S = (at^2)/2.
Следующим делом выразим квадрат времени. Для этого умножим обе части полученного уравнения на двойку, чтобы переписать его в строчку. А теперь поделим удвоенное расстояние на ускорение. Последним шагом для выражения станет извлечение квадратного корня из этого выражения. Ну вот, мы максимально упростили формулу. Теперь она выглядит так: T = sqrt(2S/a). Остается только подставить числа. В итоге получим, что автомобиль прошел данное расстояние за время, равное примерно 6,32 секунды.
fb.ru
Кинематика. Основные понятия кинематики: механическое движение, материальная точка
Содержание и основные понятия кинематики. Чтобы обработать деталь на металлорежущем станке, необходимо предварительно настроить станок. В коробке скоростей и в механизмах подачи детали, передающие вращение от электродвигателя, соединяют так, что обеспечиваются вполне определенные перемещения детали и инструмента в течении некоторого времени. Перемещение одних тел или частей тела относительно других называется механическим движением. Раздел механики, изучающий механическое движение на основании законов геометрии, называют кинематикой. При этом не принимаются во внимание ни свойства движущихся тел, ни силы, под воздействием которых происходит движение. Так как при движении тела различные его точки могут двигаться по- разному, то в кинематике сначала изучается движение более простого объекта, а именно материальной точки.
Материальной точкой называют такое тело, размерами и формой которого можно пренебречь в данной задаче. Например, изучая движение искусственного спутника Земли, можно пренебречь его линейными размерами по сравнению с теми большими расстояниями, которые он преодолевает. В такой задаче спутник может рассматриваться как материальная точка.
Введение понятия материальной точки вносит значительное упрощение в исследование движения тел. Для решения задач о движении тела в целом достаточно знать движение одной или двух его точек.
Движущееся тело всегда проходит определенный путь в пространстве от начальной до конечной точки движения, на что затрачивается определенное время.
Таким образом, механическое движение есть перемещение тел в пространстве и во времени.
Пространство и время являются такими же необходимыми условиями существования окружающего нас мира, как и движение.
Изучая движение в пространстве и во времени, устанавливают геометрические показатели движения — пройденный путь и траекторию движения. В то же время определяют качественные зависимости движения — быстроту движения и интенсивность ее изменения. Рассматривая тело в движении, отмечают начало и конец движения, и на этом отрезке определяют особенности движения.
В материальном мире покой и движение относительны. Наблюдаемые нами неподвижные тела (здания, сооружения, неработающие машины) находятся лишь в относительном покое, то есть в покое относительно Земли. В действительности они осуществляют сложное движение вместе с Землей в мировом пространстве.
В относительном покое можно рассматривать и некоторые подвижные тела. К примеру, неподвижный пассажир в движущемся вагоне находится в движении лишь по отношению к Земле, а по отношению к вагону он в покое.
Отсюда следует, что всякое движение относительно, так как рассматривается по отношению к определенным телам. Принцип относительности движения позволяет установить особенности его различных видов. Так, конец педали велосипеда по отношению к раме описывает окружность, а по отношению к Земле — сложную кривую.
Используя принцип относительности, можно неподвижное тело принять за подвижное, если рассматривать его относительно движущегося тела.
Именно такой эффект можно наблюдать из неподвижного вагона в тот момент, когда рядом расположенный состав находится в движении: нам кажется, что состав неподвижен, а в движении находится вагон, в котором мы находимся.
Таким образом, всякий покой и движение относительны, и рассматривать механическое движение необходимо в каждом случае с учетом конкретных условий движения и времени.
К основным понятиям кинематики относятся: траектория движения, его продолжительность, пройденный путь, скорость, ускорение.
Траекторией называют линию, которую описывает движущаяся точка в пространстве (рис. 15). Траектории весьма разнообразны: они могут иметь вид прямой линии, окружности, эллипса, параболы (I), циклоиды (II) и других кривых. Длина траектории при движении материальной точки характеризует пройденный путь. При движении по прямой от одной точки пространства к другой пройденный путь равен расстоянию между точками, при движении по другим траекториям путь получается больше расстояния.
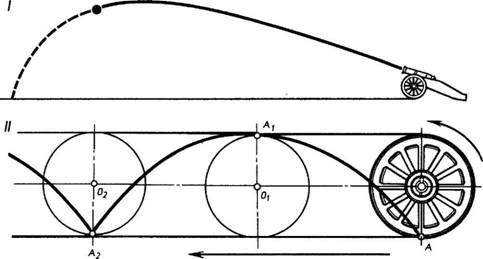
Рис. 15
Величина пути и продолжительность движения во времени определяют скорость движения.
Скорость есть быстрота перемещения тел от одной точки пространства к другой, которая определяется величиной пути, проходимого за единицу времени.
Движение тела с постоянной скоростью называют равномерным, движение с переменной скоростью — переменным.
Величина, определяющая изменение скорости с течением времени, называется ускорением.
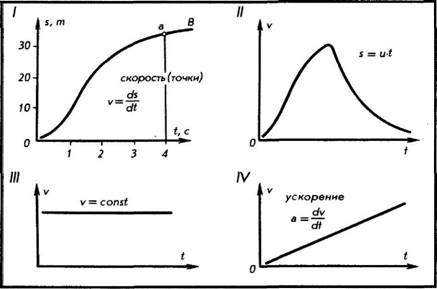
Рис. 16
Из рассмотрения основных понятий кинематики следует, что между кинематическими величинами механического движения существует тесная связь.
Пройденный путь, скорость и ускорение зависят от времени: с течением времени путь возрастает, а скорость и ускорение могут оставаться постоянными или меняться в большую или меньшую сторону.
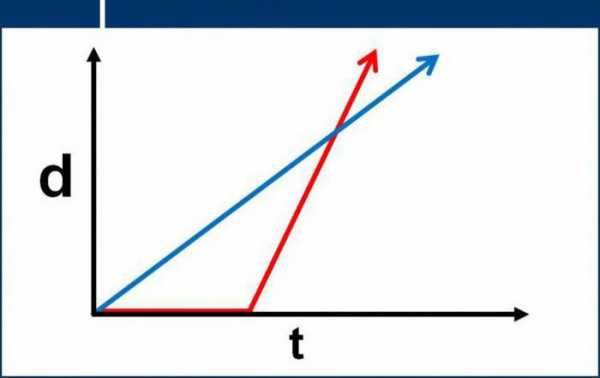
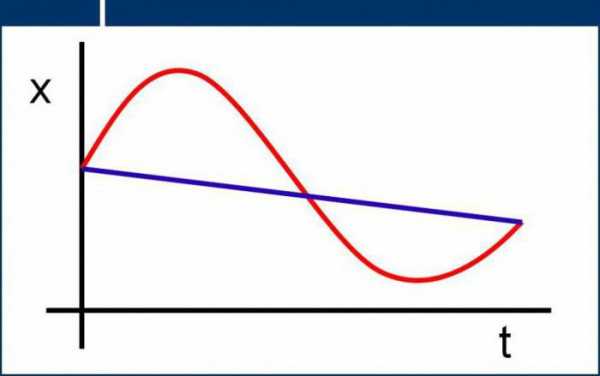
Закон движения точки может быть выражен графически прямой или кривой линией в координатных осях пути и времени. На рис, 16, I график движения представлен кривой AB, каждая точка которой соответствует определенному пути и времени. Например, точка а показывает, что к концу 4-й секунды движения пройден путь 35 м.
Используя графический метод, можно построить график пути в зависимости от скорости и времени (рис. 16, II), график ускорения в зависимости от времени, график скорости в зависимости от времени и ускорения (рис. 16, III и IV). Следует иметь в виду, что график движения определяет не форму траектории, а зависимость между указанными величинами.
Кинематика имеет большое прикладное значение. На ее основе изучается движение звеньев механизмов и рабочих органов машин, делаются выводы, которые используются при проектировании новых механизмов, машин, приборов и других механических устройств.
Простейшие движения твердого тела. Простейшим видом движения тела является равномерное прямолинейное движение. В таком движении, к примеру, находится поезд на Прямом участке пути и т. д. Движение, при котором тело перемещается по прямой и за равные отрезки времени проходит одинаковые пути, называется равномерным прямолинейным (рис. 17, I).
Рис. 17
Скорость равномерного движения определяется отношением пройденного пути ко времени движения. Единицы скорости устанавливаются по единицам пути и времени. Если, например, путь выражен в метрах, а время в секундах, то скорость получается в м/с. В таких единицах измеряют скорость течения воды по трубам, движение воздуха под действием вентилятора и т. д. Скорость резания металла на станках измеряют в м/мин, а скорость транспортных машин — в км/ч.
В движении тело может совершать различные перемещения с различными скоростями и ускорениями. Одно из таких перемещений — прямолинейное возвратно-поступательное движение (рис. 17, II). Наиболее типичный пример такого движения — поршень механизма двигателя внутреннего сгорания. Но в отличие от равномерного движения тела в первом примере, поршень движется неравномерно, так как при повороте кривошипа (коленчатого вала), с которым он сочленен, на равные углы, поршень проходит неравные пути.
Движение, при котором за равные отрезки времени тело проходит неравные пути, называют переменным или неравномерным. Такое движение происходит во время разбега машин или торможения.
В переменном движении скорость изменяется непрерывно, ее величина различна в каждый момент времени. Поэтому такую скорость называют мгновенной.
Движение, при котором скорость возрастает, называют ускоренны м, а прирост скорости за единицу времени называют ускорением. Численная величина ускорения определяется отношением разности мгновенных скоростей между рассматриваемыми точками пути ко времени, в течении которого происходило изменение скорости.
Движение тела по отношению к неподвижной системе отсчета называется абсолютным движением. Движение тела по отношению к движущейся системе отсчета называется относительным движением (рис. 17, III).
Криволинейное движение является одним из самых распространенных видов движения в механизмах многих машин. В криволинейном движении тело также занимает последовательные положения на траектории и в каждый момент времени имеет определенную мгновенную скорость.
Криволинейным (рис. 17, IV) принято называть такое движение, при котором тело при перемещении описывает кривую линию — траекторию относительно выбранной системы отсчета.
Рассматривая положения тела через бесконечно малые отрезки времени, можно считать, что вектор скорости совпадает с направлением движения. Но так как направление в криволинейном движении непрерывно меняется, то и вектор скорости тела при переходе его в каждое новое положение изменяет свое направление по отношению к предыдущему направлению.
Таким образом, вектор скорости тела в криволинейном движении непрерывно изменяет свое направление соответственно форме траектории, оставаясь все время касательным к ней.
Этот вывод подтверждается многочисленными примерами из практики: раскаленные частицы камня и металла отлетают от точильного круга при его вращении по касательным; потоки воды в работающем центробежном насосе устремляются из колеса по касательным к ее окружностям; частицы при отрыве от общей массы тела на криволинейной траектории также отлетают по касательной к траектории в месте отрыва.
3.3. Поступательное и вращательное движения твердого тела. Поступательным называют такое движение, при котором все точки тела имеют одинаковые траектории. Если соединить две любые точки поступательно движущегося тела прямой линией, то эта прямая остается все время параллельна самой себе (рис. 18).
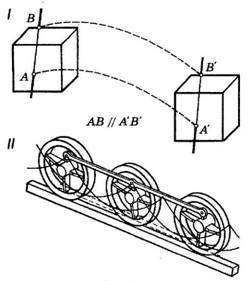
Рис. 18
Сохранение параллельности прямых во всех положениях тела — главный признак поступательного движения.
В большинстве случаев точки поступательно движущегося тела имеют прямолинейные траектории (рис. 18, I). В таком движении находятся, например, поршни компрессоров и насосов, транспортные машины на прямом участке пути и т. п.
Но могут быть случаи криволинейного поступательного движения (рис. 18, II). Так движется, например, рычаг, соединяющий ведущие колеса паровоза. Он прикреплен к колесам шарнирно на равном расстоянии от осей.
Благодаря этому при перекатывании колес по рельсам рычаг остается параллельным самому себе, а все точки (см. рис. 18) описывают в пространстве кривые векторного переноса (одинаковые кривые со сдвигом).
Сохранение параллельности линий движущегося тела возможно в том случае, когда все точки этих линий, перемещаясь из одного положения в другое, проходят одинаковый путь. Отсюда следует, что в поступательном движении все точки тела имеют одинаковые скорости и ускорения, поэтому для характеристики поступательно движущегося тела достаточно знать скорость и ускорение какой-либо одной его точки.
Вращательное движение широко распространено в природе и технике. Планеты Солнечной системы вращаются вокруг своей оси. Во многих механизмах и машинах так движутся валы, шкивы, зубчатые колеса, маховики и другие детали.
Вращательное движение характеризуется тем, что все точки тела описывают концентрические окружности относительно неподвижной оси, расположенной в пределах тела. Осью вращения называется геометрическое место точек, остающихся неподвижными при вращении тела (рис. 19).
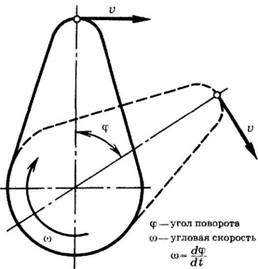
Рис. 19
Кинематическими параметрами вращающегося тела являются угловое перемещение, угловая скорость и угловое ускорение. Угловое перемещение измеряется величиной угла, на который поворачивается тело за время вращения. За единицу углового перемещения принят радиан — центральный угол, длина дуги которого равна радиусу этой дуги. 1 рад = 57,3°. Центральный угол содержит 360°: 57,3° = 6,28 или 2п рад.
Вращательное движение может быть равномерным и неравномерным. Равномерным называют такое вращение, при котором за равные промежутки времени тело поворачивается на равные углы. Величина поворота тела за единицу времени определяет угловую скорость.
Численная величина угловой скорости в равномерном вращательном движении определяется отношением углового перемещения ко времени, в течении которого происходит это перемещение.
В практических расчетах угловая скорость обычно выражается числом оборотов тела за одну минуту времени.
cherch.ru
Механика Механика Кинематика Динамика
 Механика
Механика
 Механика • Кинематика • Динамика • Статика • Законы сохранения
Механика • Кинематика • Динамика • Статика • Законы сохранения
 Кинематика • Основные понятия • Действия с векторами • Прямолинейное движение • Криволинейное движение
Кинематика • Основные понятия • Действия с векторами • Прямолинейное движение • Криволинейное движение
 Действия с векторами • Сложение векторов • Вычитание векторов • Умножение вектора на скаляр • Проекции векторов
Действия с векторами • Сложение векторов • Вычитание векторов • Умножение вектора на скаляр • Проекции векторов
 Прямолинейное движение • Равномерное • Равноускоренное • Средняя скорость
Прямолинейное движение • Равномерное • Равноускоренное • Средняя скорость
 Криволинейное движение • Тело, брошенное вертикально • Тело, брошенное горизонтально • Тело, брошенное под углом к горизонту • Движение тела по окружности
Криволинейное движение • Тело, брошенное вертикально • Тело, брошенное горизонтально • Тело, брошенное под углом к горизонту • Движение тела по окружности
 Динамика • Явление инерции • Законы Ньютона 1 Закон 2 Закон 3 Закон • Закон всемирного тяготения • Сила тяжести • Вес тела • Космические скорости • Сила упругости • Сила трения
Динамика • Явление инерции • Законы Ньютона 1 Закон 2 Закон 3 Закон • Закон всемирного тяготения • Сила тяжести • Вес тела • Космические скорости • Сила упругости • Сила трения
 Законы сохранения • Импульс • Закон сохранения импульса • Работа • Мощность • Энергия Кинетическая Потенциальная • Закон сохранения энергии
Законы сохранения • Импульс • Закон сохранения импульса • Работа • Мощность • Энергия Кинетическая Потенциальная • Закон сохранения энергии
 Статика • 1 условие равновесия • 2 условие равновесия
Статика • 1 условие равновесия • 2 условие равновесия
 Кинематика Механическое движение – это изменение положения тела относительно других тел с течением времени. Основная задача механики – определить положение тела в любой момент времени. Система отсчета состоит из: • Тела отсчета • Системы координат • Прибора для измерения времени
Кинематика Механическое движение – это изменение положения тела относительно других тел с течением времени. Основная задача механики – определить положение тела в любой момент времени. Система отсчета состоит из: • Тела отсчета • Системы координат • Прибора для измерения времени
 Кинематика – это раздел механики, который отвечает на вопрос: КАК движется тело? Перемещение – вектор соединяющий начальное и конечное положение тела. В S А Траектория – линия, по которой движется тело. Путь – длина траектории.
Кинематика – это раздел механики, который отвечает на вопрос: КАК движется тело? Перемещение – вектор соединяющий начальное и конечное положение тела. В S А Траектория – линия, по которой движется тело. Путь – длина траектории.
 Кинематика
Кинематика
 Кинематика Материальная точка – тело, размерами которого можно пренебречь. Материальной точкой тело можно считать если: • Его размеры малы по сравнению с пройденным расстоянием • Движение тела поступательно Поступательное движение – это движение тела, при котором траектории всех его точек одинаковы.
Кинематика Материальная точка – тело, размерами которого можно пренебречь. Материальной точкой тело можно считать если: • Его размеры малы по сравнению с пройденным расстоянием • Движение тела поступательно Поступательное движение – это движение тела, при котором траектории всех его точек одинаковы.
 Кинематика Поступательное движение – это движение тела, при котором траектории всех его точек одинаковы.
Кинематика Поступательное движение – это движение тела, при котором траектории всех его точек одинаковы.
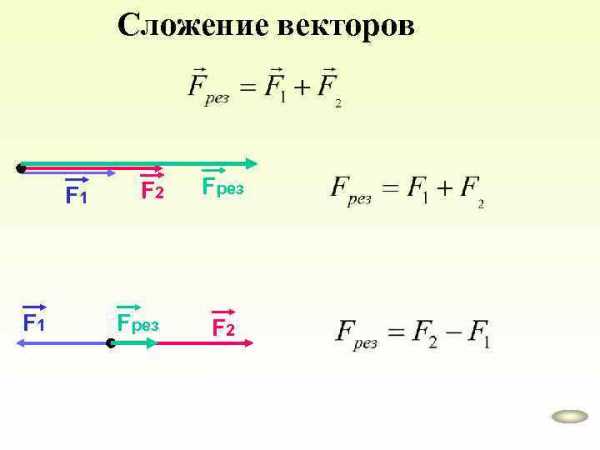 Сложение векторов F 1 F 2 Fрез F 2
Сложение векторов F 1 F 2 Fрез F 2
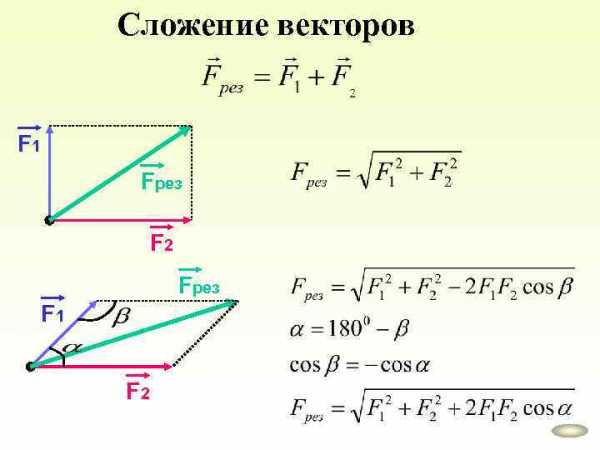 Сложение векторов F 1 Fрез F 2 Fрез F 1 F 2
Сложение векторов F 1 Fрез F 2 Fрез F 1 F 2
 Вычитание векторов Fрез F 1 F 2 F 1 Fрез
Вычитание векторов Fрез F 1 F 2 F 1 Fрез
 Вычитание векторов F 1 Fрез F 2 Fрез F 1
Вычитание векторов F 1 Fрез F 2 Fрез F 1
 Умножение вектора на скаляр F 0 F 1 F 0 F 2
Умножение вектора на скаляр F 0 F 1 F 0 F 2
 Проекции векторов y y 2 ay a y 1 0 ax x 1 x 2 x
Проекции векторов y y 2 ay a y 1 0 ax x 1 x 2 x
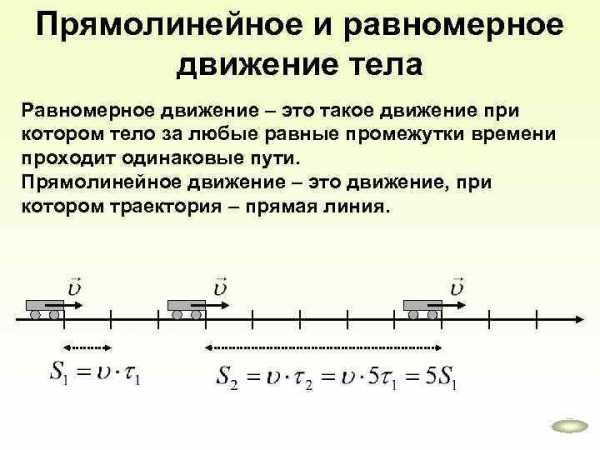 Прямолинейное и равномерное движение тела Равномерное движение – это такое движение при котором тело за любые равные промежутки времени проходит одинаковые пути. Прямолинейное движение – это движение, при котором траектория – прямая линия.
Прямолинейное и равномерное движение тела Равномерное движение – это такое движение при котором тело за любые равные промежутки времени проходит одинаковые пути. Прямолинейное движение – это движение, при котором траектория – прямая линия.
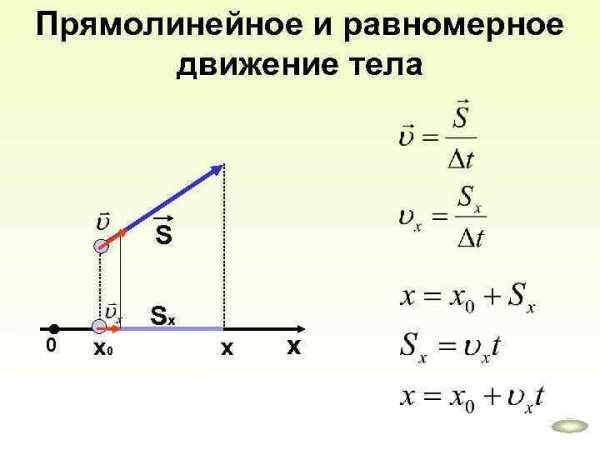 Прямолинейное и равномерное движение тела S Sx 0 x x
Прямолинейное и равномерное движение тела S Sx 0 x x
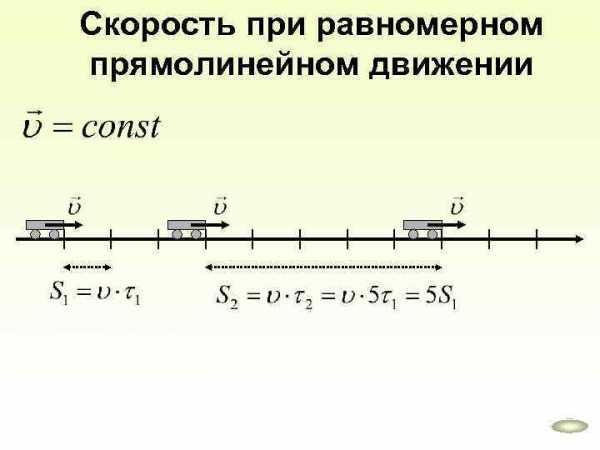 Скорость при равномерном прямолинейном движении
Скорость при равномерном прямолинейном движении
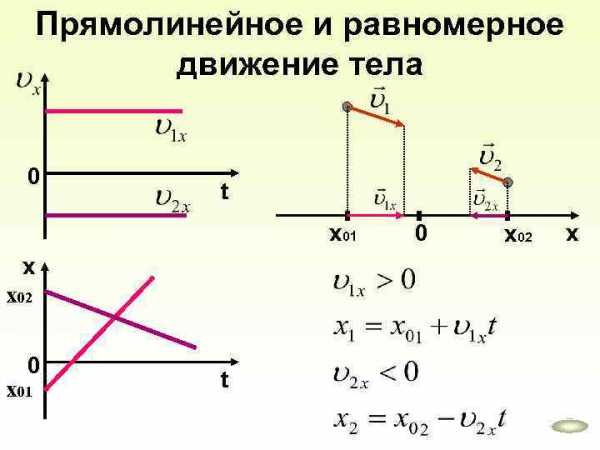 Прямолинейное и равномерное движение тела 0 t x 01 x х02 0 х01 t 0 x 02 x
Прямолинейное и равномерное движение тела 0 t x 01 x х02 0 х01 t 0 x 02 x
 Прямолинейное и равномерное движение тела Sх 0 t t Перемещение тела за время t равно площади фигуры под графиком зависимости скорости от времени.
Прямолинейное и равномерное движение тела Sх 0 t t Перемещение тела за время t равно площади фигуры под графиком зависимости скорости от времени.
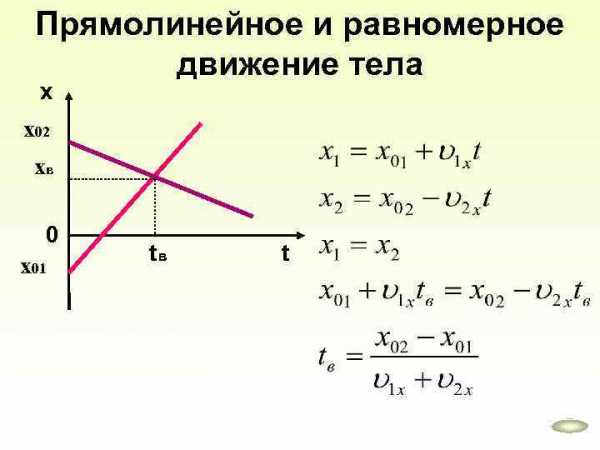 Прямолинейное и равномерное движение тела x х02 хв 0 х01 tв t
Прямолинейное и равномерное движение тела x х02 хв 0 х01 tв t
 Средняя скорость х S 1, t 1 S 2, t 2 Sобщ, tобщ S 3, t 3
Средняя скорость х S 1, t 1 S 2, t 2 Sобщ, tобщ S 3, t 3
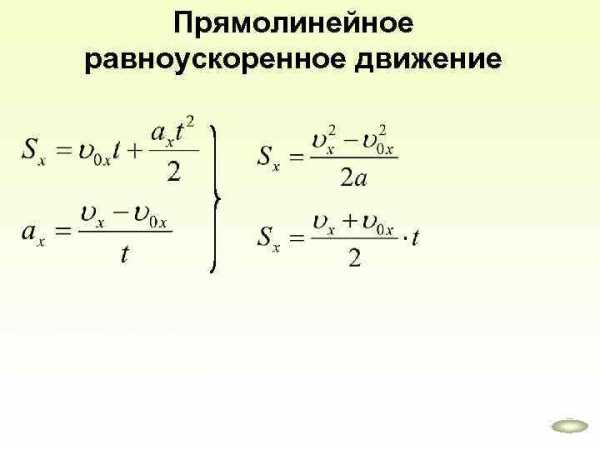
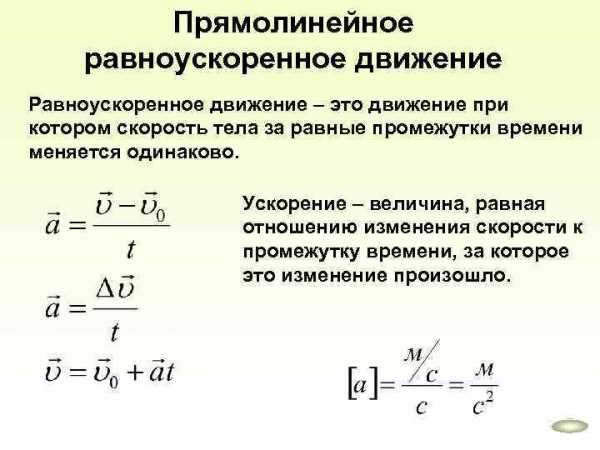 Прямолинейное равноускоренное движение Равноускоренное движение – это движение при котором скорость тела за равные промежутки времени меняется одинаково. Ускорение – величина, равная отношению изменения скорости к промежутку времени, за которое это изменение произошло.
Прямолинейное равноускоренное движение Равноускоренное движение – это движение при котором скорость тела за равные промежутки времени меняется одинаково. Ускорение – величина, равная отношению изменения скорости к промежутку времени, за которое это изменение произошло.
 Прямолинейное равноускоренное движение 1 0 t 2 1 2 х
Прямолинейное равноускоренное движение 1 0 t 2 1 2 х
 Прямолинейное равноускоренное движение Sx 0 t t
Прямолинейное равноускоренное движение Sx 0 t t
 Прямолинейное равноускоренное движение Sx 0 t
Прямолинейное равноускоренное движение Sx 0 t
 Прямолинейное равноускоренное движение
Прямолинейное равноускоренное движение
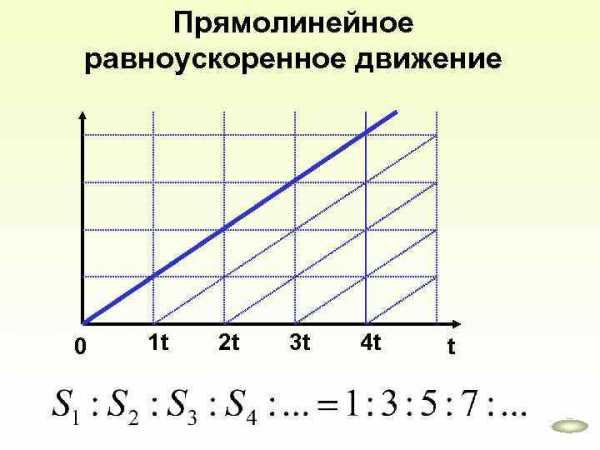 Прямолинейное равноускоренное движение 0 1 t 2 t 3 t 4 t t
Прямолинейное равноускоренное движение 0 1 t 2 t 3 t 4 t t
 Движение тела брошенного под углом к горизонту
Движение тела брошенного под углом к горизонту
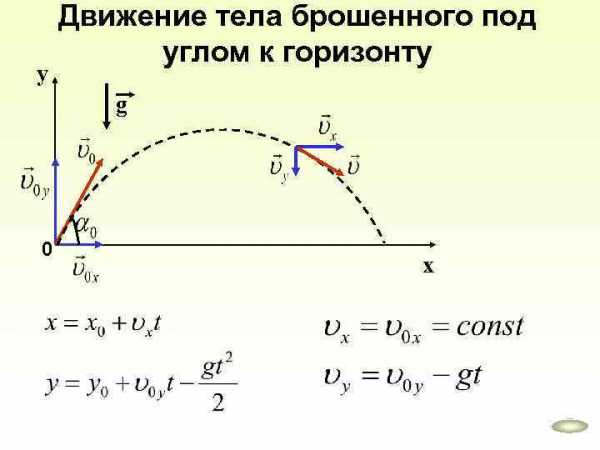 у Движение тела брошенного под углом к горизонту g 0 х
у Движение тела брошенного под углом к горизонту g 0 х
 Движение тела брошенного под углом к горизонту у 0 g х
Движение тела брошенного под углом к горизонту у 0 g х
 Движение тела брошенного под углом к горизонту у 0 g х
Движение тела брошенного под углом к горизонту у 0 g х
 Движение тела брошенного под углом к горизонту у 0 g xmax х
Движение тела брошенного под углом к горизонту у 0 g xmax х
 у Движение тела брошенного под углом к горизонту g ymax 0 х
у Движение тела брошенного под углом к горизонту g ymax 0 х
 у Движение тела, брошенного вертикально g g у
у Движение тела, брошенного вертикально g g у
 у ymax 0 Движение тела, брошенного горизонтально g х
у ymax 0 Движение тела, брошенного горизонтально g х
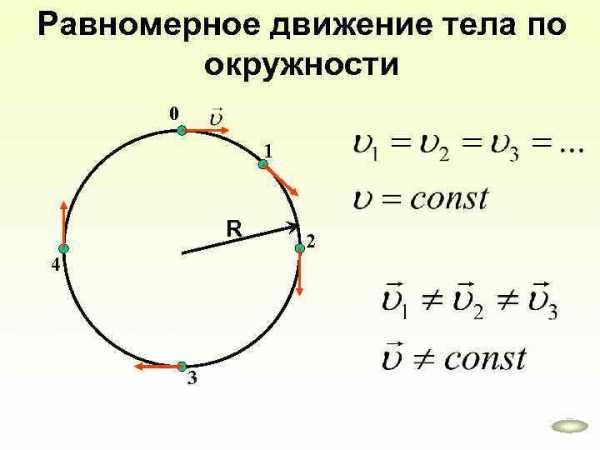 Равномерное движение тела по окружности 0 1 R 4 3 2
Равномерное движение тела по окружности 0 1 R 4 3 2
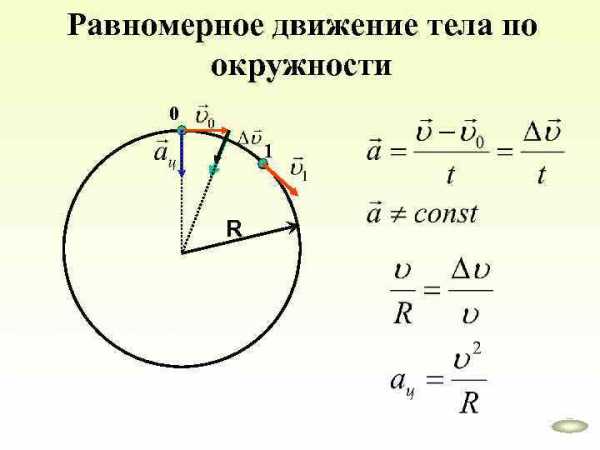 Равномерное движение тела по окружности 0 1 R
Равномерное движение тела по окружности 0 1 R
 Динамика – раздел механики, который отвечает на вопрос: ПОЧЕМУ движется тело? Причина изменения скорости тела – воздействие на него других тел. Если на тело не действуют другие тела, то оно либо покоится, либо движется прямолинейно и равномерно.
Динамика – раздел механики, который отвечает на вопрос: ПОЧЕМУ движется тело? Причина изменения скорости тела – воздействие на него других тел. Если на тело не действуют другие тела, то оно либо покоится, либо движется прямолинейно и равномерно.
 Законы Ньютона 1 закон Ньютона: Существуют такие системы отсчета, относительно которых тело движется прямолинейно и равномерно или покоится при отсутствии внешних воздействий. Такие с. о. называются инерциальными (ИСО). Инерция – явление при котором скорость тела остается неизменной при отсутствии на него внешних воздействий.
Законы Ньютона 1 закон Ньютона: Существуют такие системы отсчета, относительно которых тело движется прямолинейно и равномерно или покоится при отсутствии внешних воздействий. Такие с. о. называются инерциальными (ИСО). Инерция – явление при котором скорость тела остается неизменной при отсутствии на него внешних воздействий.
 Законы Ньютона Инертность – свойство тела сохранять свою скорость при отсутствии внешних воздействий. Мера инертности – масса тела. (Чем больше масса тела, тем труднее изменить его скорость). Сила – количественная мера взаимодействия тел. F 1 Равнодействующая – векторная сумма всех сил, действующих на тело. Fрез F 2
Законы Ньютона Инертность – свойство тела сохранять свою скорость при отсутствии внешних воздействий. Мера инертности – масса тела. (Чем больше масса тела, тем труднее изменить его скорость). Сила – количественная мера взаимодействия тел. F 1 Равнодействующая – векторная сумма всех сил, действующих на тело. Fрез F 2
 Законы Ньютона 2 закон Ньютона: Ускорение тела прямо пропорционально силе, действующей на тело и обратно пропорционально массе этого тела.
Законы Ньютона 2 закон Ньютона: Ускорение тела прямо пропорционально силе, действующей на тело и обратно пропорционально массе этого тела.
 Законы Ньютона 3 закон Ньютона: Силы, с которыми тела действуют друг на друга, равны по модулю и противоположны по направлению.
Законы Ньютона 3 закон Ньютона: Силы, с которыми тела действуют друг на друга, равны по модулю и противоположны по направлению.
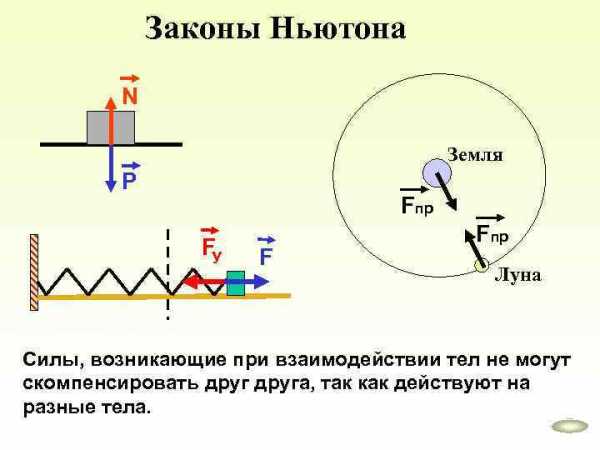 Законы Ньютона N Земля P Fпр F У F Fпр Луна Силы, возникающие при взаимодействии тел не могут скомпенсировать друга, так как действуют на разные тела.
Законы Ньютона N Земля P Fпр F У F Fпр Луна Силы, возникающие при взаимодействии тел не могут скомпенсировать друга, так как действуют на разные тела.
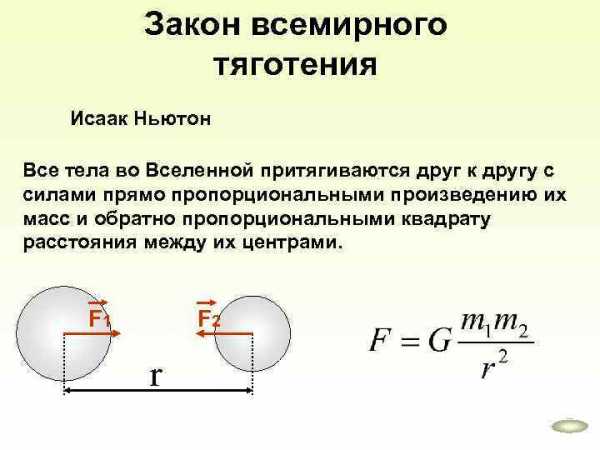 Закон всемирного тяготения Исаак Ньютон Все тела во Вселенной притягиваются друг к другу с силами прямо пропорциональными произведению их масс и обратно пропорциональными квадрату расстояния между их центрами. F 1 F 2 r
Закон всемирного тяготения Исаак Ньютон Все тела во Вселенной притягиваются друг к другу с силами прямо пропорциональными произведению их масс и обратно пропорциональными квадрату расстояния между их центрами. F 1 F 2 r
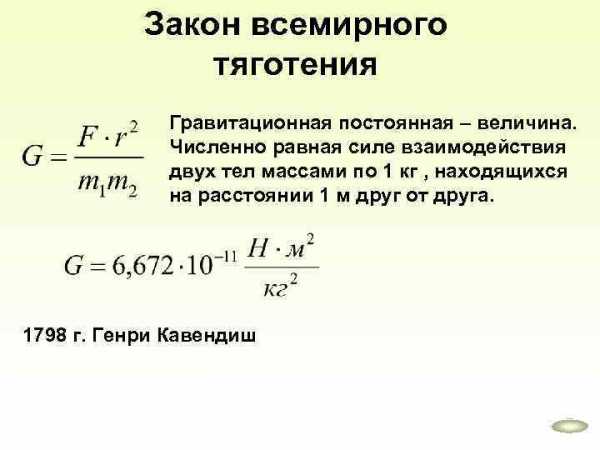 Закон всемирного тяготения Гравитационная постоянная – величина. Численно равная силе взаимодействия двух тел массами по 1 кг , находящихся на расстоянии 1 м друг от друга. 1798 г. Генри Кавендиш
Закон всемирного тяготения Гравитационная постоянная – величина. Численно равная силе взаимодействия двух тел массами по 1 кг , находящихся на расстоянии 1 м друг от друга. 1798 г. Генри Кавендиш
 Сила тяжести m h Мз Rз
Сила тяжести m h Мз Rз
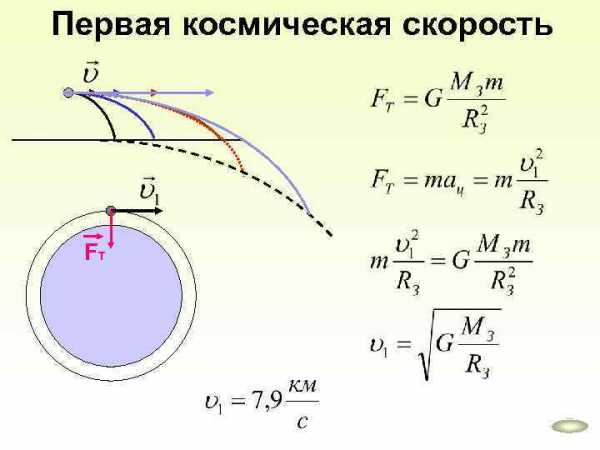 Первая космическая скорость FТ
Первая космическая скорость FТ
 Первая космическая скорость FТ h
Первая космическая скорость FТ h
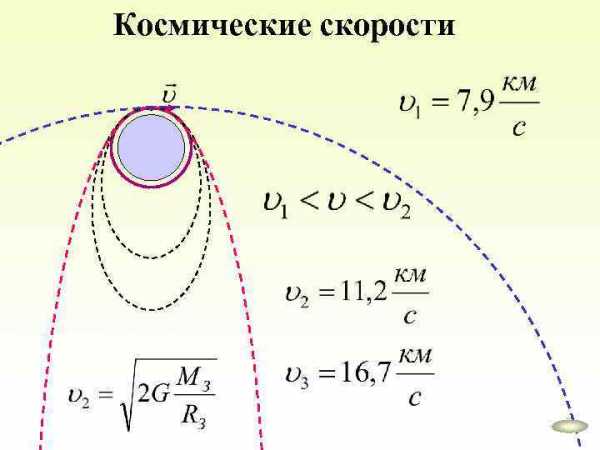 Космические скорости
Космические скорости
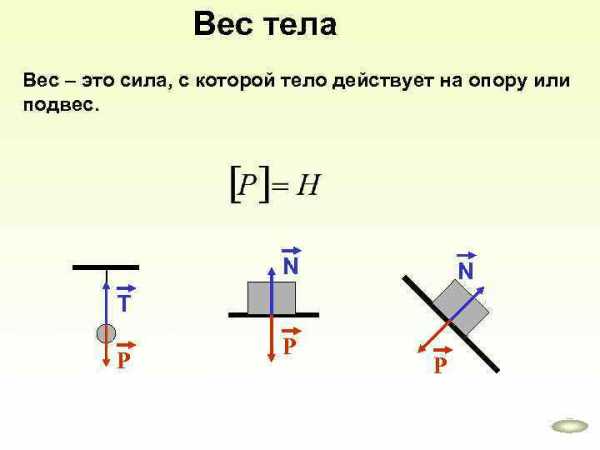 Вес тела Вес – это сила, с которой тело действует на опору или подвес. N N T Р Р Р
Вес тела Вес – это сила, с которой тело действует на опору или подвес. N N T Р Р Р
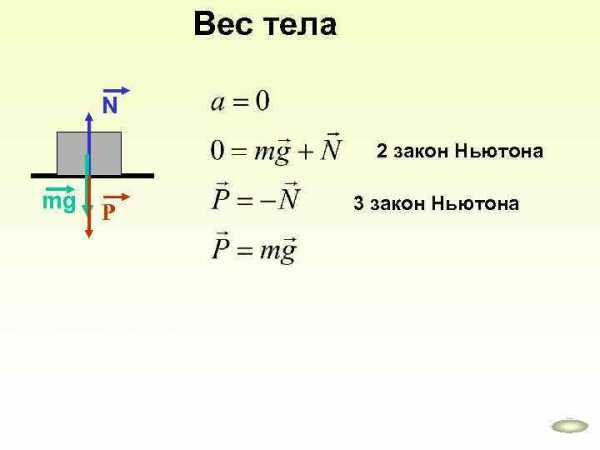 Вес тела N 2 закон Ньютона mg Р 3 закон Ньютона
Вес тела N 2 закон Ньютона mg Р 3 закон Ньютона
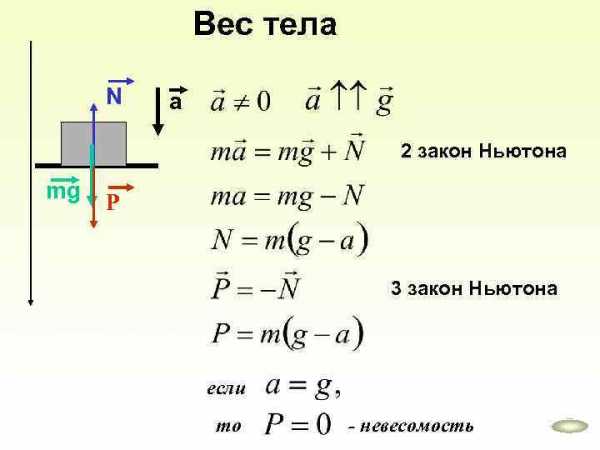 Вес тела N a 2 закон Ньютона mg Р 3 закон Ньютона если то – невесомость
Вес тела N a 2 закон Ньютона mg Р 3 закон Ньютона если то – невесомость
 Вес тела N a 2 закон Ньютона mg Р 3 закон Ньютона Перегрузка – явление увеличения веса тела. – коэффициент перегрузки
Вес тела N a 2 закон Ньютона mg Р 3 закон Ньютона Перегрузка – явление увеличения веса тела. – коэффициент перегрузки
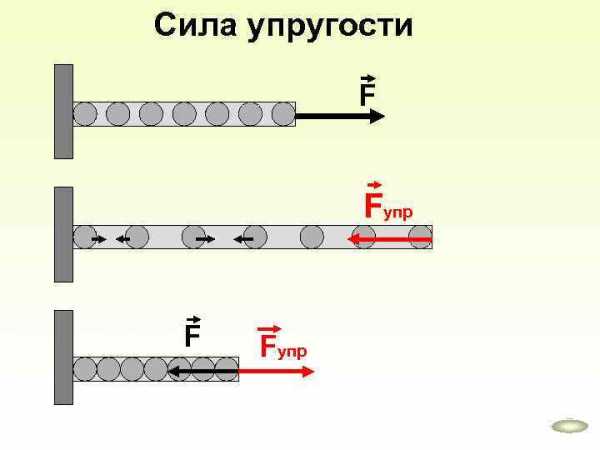 Сила упругости F Fупр
Сила упругости F Fупр
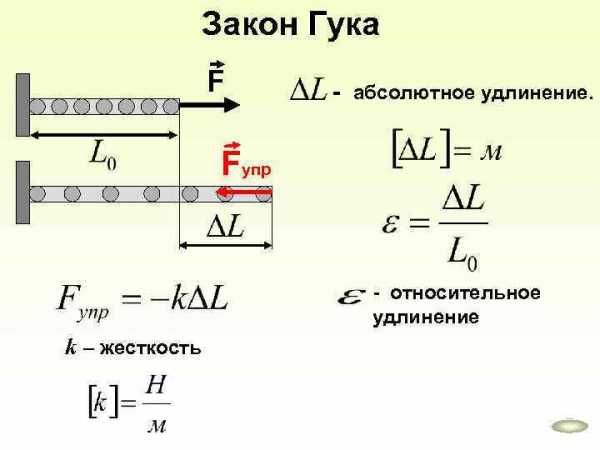 Закон Гука F – абсолютное удлинение. Fупр – относительное удлинение k – жесткость
Закон Гука F – абсолютное удлинение. Fупр – относительное удлинение k – жесткость
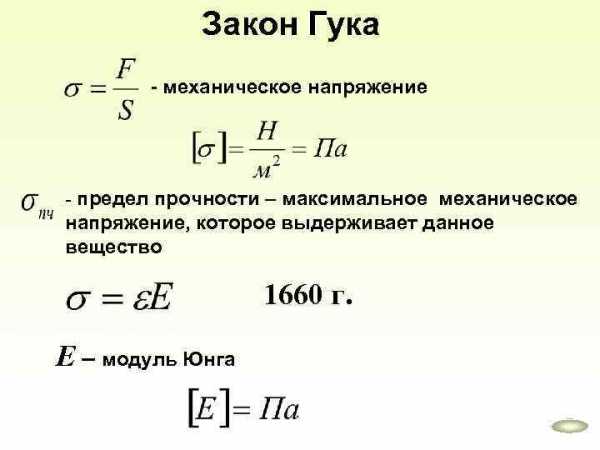 Закон Гука – механическое напряжение – предел прочности – максимальное механическое напряжение, которое выдерживает данное вещество 1660 г. Е – модуль Юнга
Закон Гука – механическое напряжение – предел прочности – максимальное механическое напряжение, которое выдерживает данное вещество 1660 г. Е – модуль Юнга
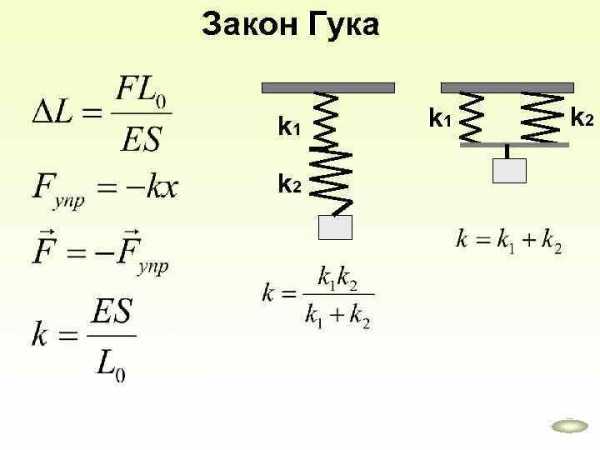 Закон Гука k 1 k 2
Закон Гука k 1 k 2
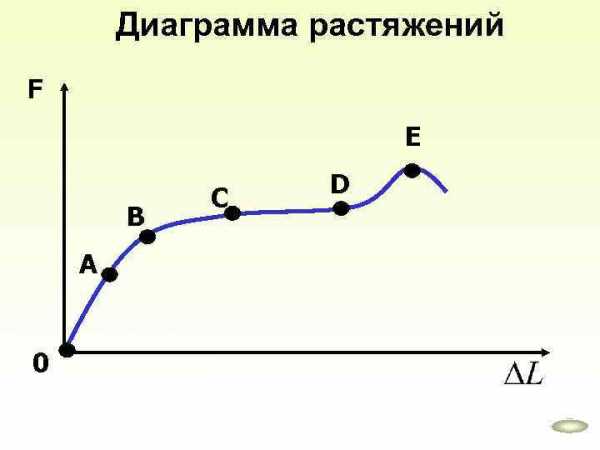 Диаграмма растяжений F Е В А 0 С D
Диаграмма растяжений F Е В А 0 С D
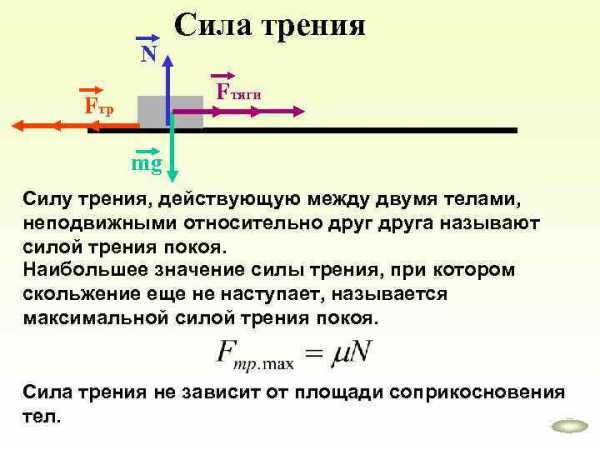 N Сила трения Fтяги Fтр mg Cилу трения, действующую между двумя телами, неподвижными относительно друга называют силой трения покоя. Наибольшее значение силы трения, при котором скольжение еще не наступает, называется максимальной силой трения покоя. Сила трения не зависит от площади соприкосновения тел.
N Сила трения Fтяги Fтр mg Cилу трения, действующую между двумя телами, неподвижными относительно друга называют силой трения покоя. Наибольшее значение силы трения, при котором скольжение еще не наступает, называется максимальной силой трения покоя. Сила трения не зависит от площади соприкосновения тел.
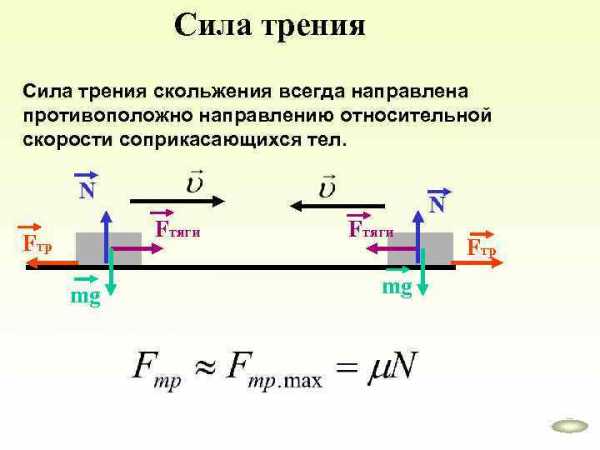 Сила трения скольжения всегда направлена противоположно направлению относительной скорости соприкасающихся тел. N Fтяги Fтр mg Fтяги mg N Fтр
Сила трения скольжения всегда направлена противоположно направлению относительной скорости соприкасающихся тел. N Fтяги Fтр mg Fтяги mg N Fтр
 Тело на наклонной плоскости у Fтр N mgх mgу mg х
Тело на наклонной плоскости у Fтр N mgх mgу mg х
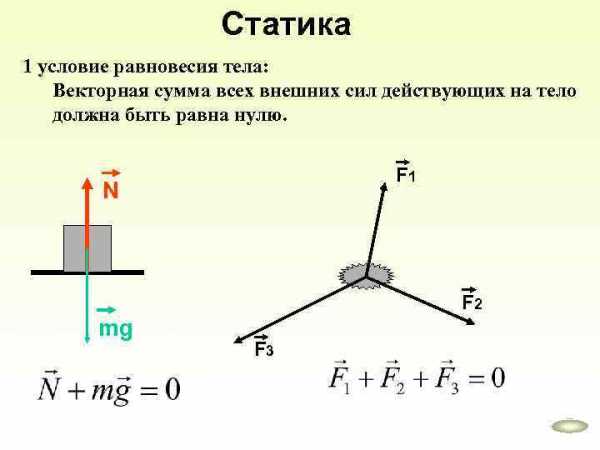 Статика 1 условие равновесия тела: Векторная сумма всех внешних сил действующих на тело должна быть равна нулю. F 1 N F 2 mg F 3
Статика 1 условие равновесия тела: Векторная сумма всех внешних сил действующих на тело должна быть равна нулю. F 1 N F 2 mg F 3
 Статика Если тело имеет ось вращения, то: F 1 0 F 2 1 условия недостаточно
Статика Если тело имеет ось вращения, то: F 1 0 F 2 1 условия недостаточно
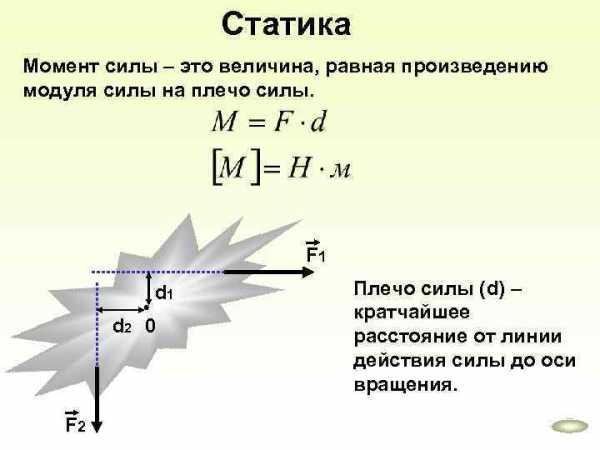 Статика Момент силы – это величина, равная произведению модуля силы на плечо силы. F 1 d 2 0 F 2 Плечо силы (d) – кратчайшее расстояние от линии действия силы до оси вращения.
Статика Момент силы – это величина, равная произведению модуля силы на плечо силы. F 1 d 2 0 F 2 Плечо силы (d) – кратчайшее расстояние от линии действия силы до оси вращения.
 Статика Момент силы считается положительным, если сила вращает тело против часовой стрелки. Момент силы считается отрицательным, если сила вращает тело по часовой стрелке. М 10
Статика Момент силы считается положительным, если сила вращает тело против часовой стрелки. Момент силы считается отрицательным, если сила вращает тело по часовой стрелке. М 10
 Статика 2 условие равновесия тела: Сумма моментов сил действующих на тело должна быть равна нулю. F 1 d 2 0 F 2
Статика 2 условие равновесия тела: Сумма моментов сил действующих на тело должна быть равна нулю. F 1 d 2 0 F 2
 Импульс – импульс силы – импульс тела
Импульс – импульс силы – импульс тела
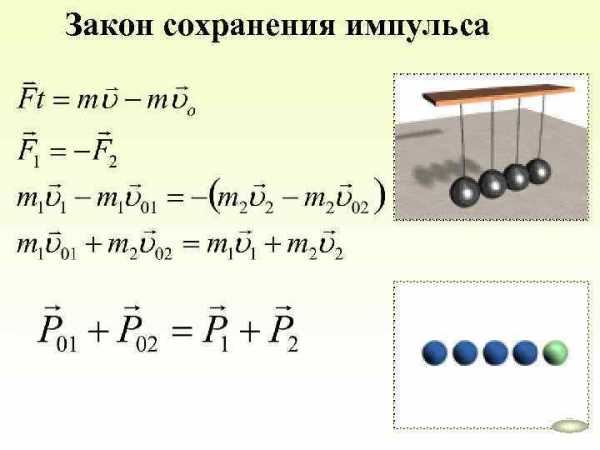 Закон сохранения импульса
Закон сохранения импульса
 Закон сохранения импульса упругий удар
Закон сохранения импульса упругий удар
 Закон сохранения импульса неупругий удар
Закон сохранения импульса неупругий удар
 Закон сохранения импульса Реактивное движение
Закон сохранения импульса Реактивное движение
 Закон сохранения импульса
Закон сохранения импульса
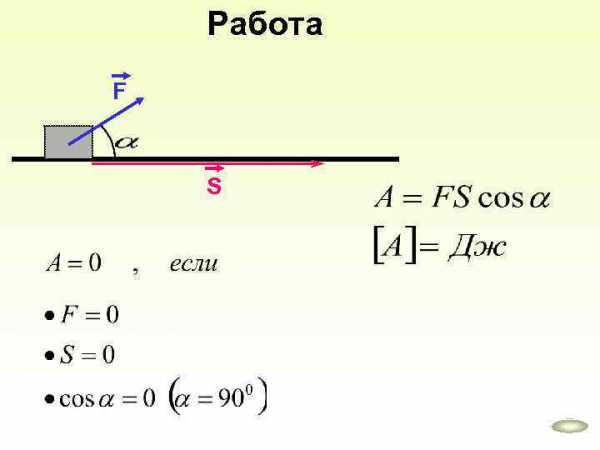 Работа F S
Работа F S
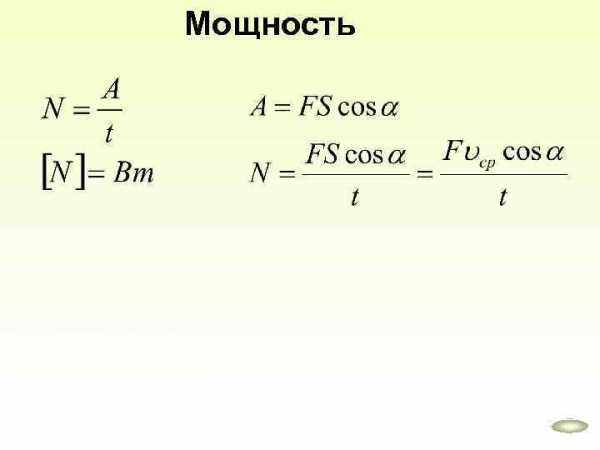 Мощность
Мощность
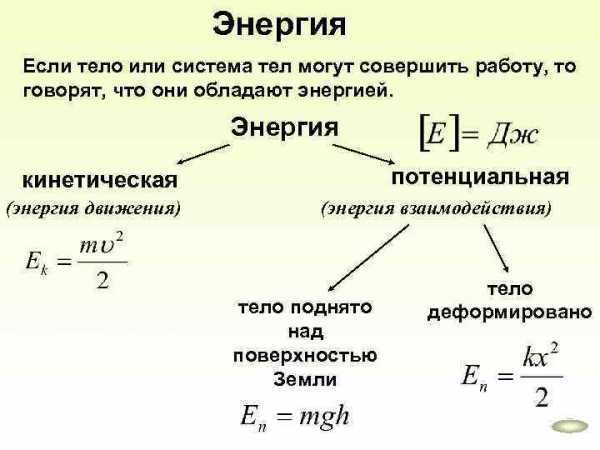 Энергия Если тело или система тел могут совершить работу, то говорят, что они обладают энергией. Энергия потенциальная кинетическая (энергия движения) (энергия взаимодействия) тело поднято над поверхностью Земли тело деформировано
Энергия Если тело или система тел могут совершить работу, то говорят, что они обладают энергией. Энергия потенциальная кинетическая (энергия движения) (энергия взаимодействия) тело поднято над поверхностью Земли тело деформировано
 Кинетическая энергия F 0 F S x
Кинетическая энергия F 0 F S x
 Потенциальная энергия mg h h 1 h 2
Потенциальная энергия mg h h 1 h 2
 Работа силы тяжести не зависит от траектории движения тела, а только от начального и конечного положения тела. h hн hк
Работа силы тяжести не зависит от траектории движения тела, а только от начального и конечного положения тела. h hн hк
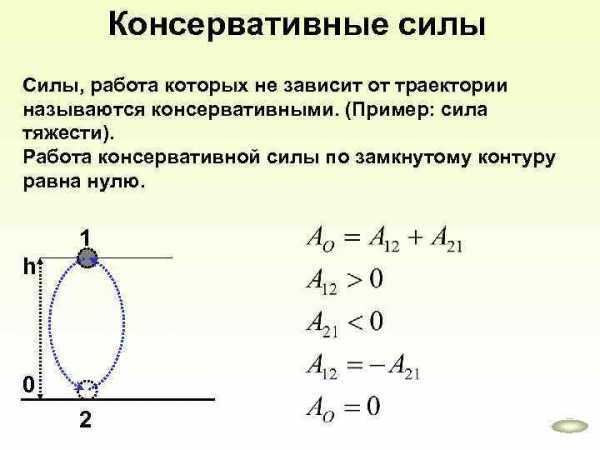 Консервативные силы Силы, работа которых не зависит от траектории называются консервативными. (Пример: сила тяжести). Работа консервативной силы по замкнутому контуру равна нулю. 1 h 0 2
Консервативные силы Силы, работа которых не зависит от траектории называются консервативными. (Пример: сила тяжести). Работа консервативной силы по замкнутому контуру равна нулю. 1 h 0 2
 Потенциальная энергия F У 1 F У 2 Х Х 1 0
Потенциальная энергия F У 1 F У 2 Х Х 1 0
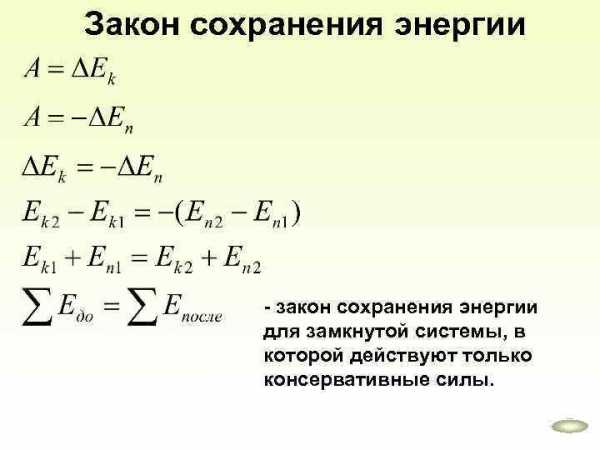 Закон сохранения энергии – закон сохранения энергии для замкнутой системы, в которой действуют только консервативные силы.
Закон сохранения энергии – закон сохранения энергии для замкнутой системы, в которой действуют только консервативные силы.
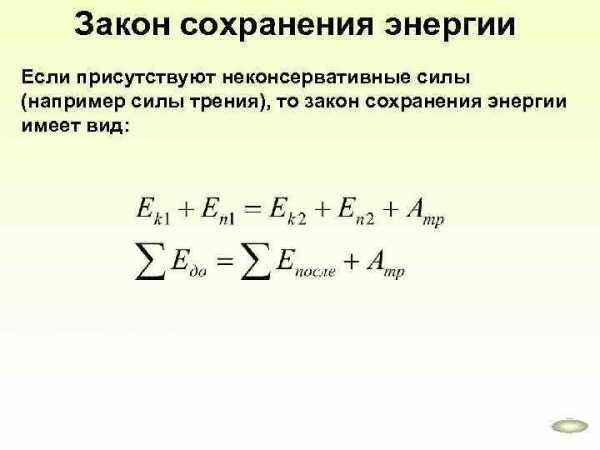 Закон сохранения энергии Если присутствуют неконсервативные силы (например силы трения), то закон сохранения энергии имеет вид:
Закон сохранения энергии Если присутствуют неконсервативные силы (например силы трения), то закон сохранения энергии имеет вид:
present5.com